

Method for positioning video camera using two arbitrary coplane circles
A camera calibration, coplanar circle technology, used in image analysis, image data processing, instruments, etc., can solve the problems of complex equation description, convergence dependence, no clear proposed algorithm initialization, etc., to achieve automatic calibration, reduce The effect of measurement error
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] In order to better understand the present invention, the technical solutions of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
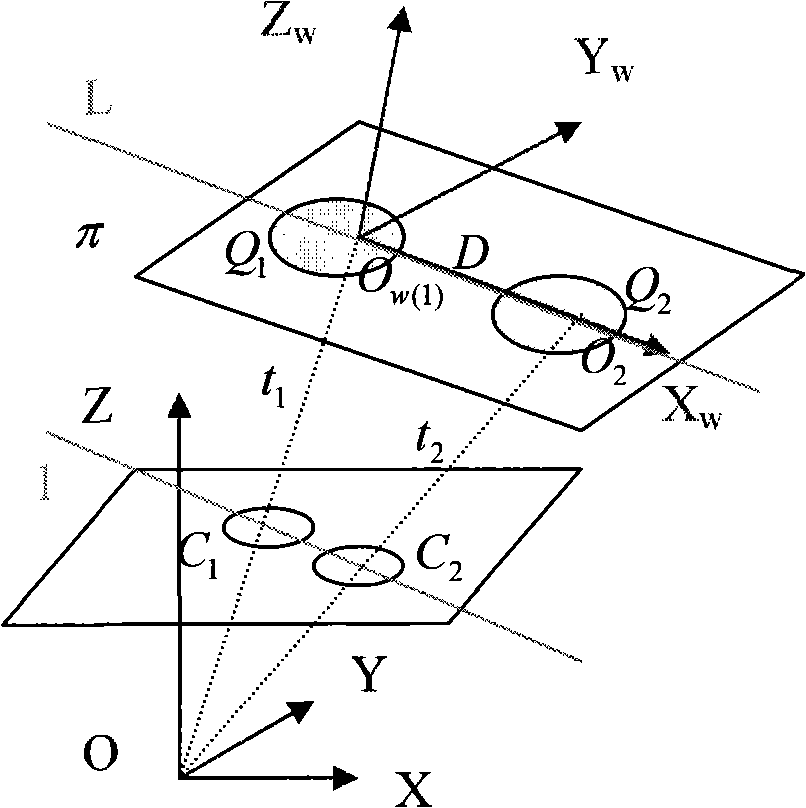
[0018] figure 1 Shown is a schematic diagram of the projection of the calibration object proposed by the present invention on the image plane. The two arbitrary circles used for calibration are on the plane π, OXYZ is the camera coordinate system, O w x w Y w Z w is the world coordinate system, where O w Now on the center of the left circle in the figure (it can also be on the center of the right circle in the figure), Z w The axis is parallel to the normal direction of the plane π. Assuming that the internal parameter matrix of the camera is K, then according to the pinhole model, K = f 1 s ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More