

Holder fork parallel move type palletizing mechanical arm
A translational, manipulator technology, applied in the field of palletizing manipulators, can solve the problems of poor palletizing effect of bags, and achieve the effects of stable operation, deformation prevention and easy stacking
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
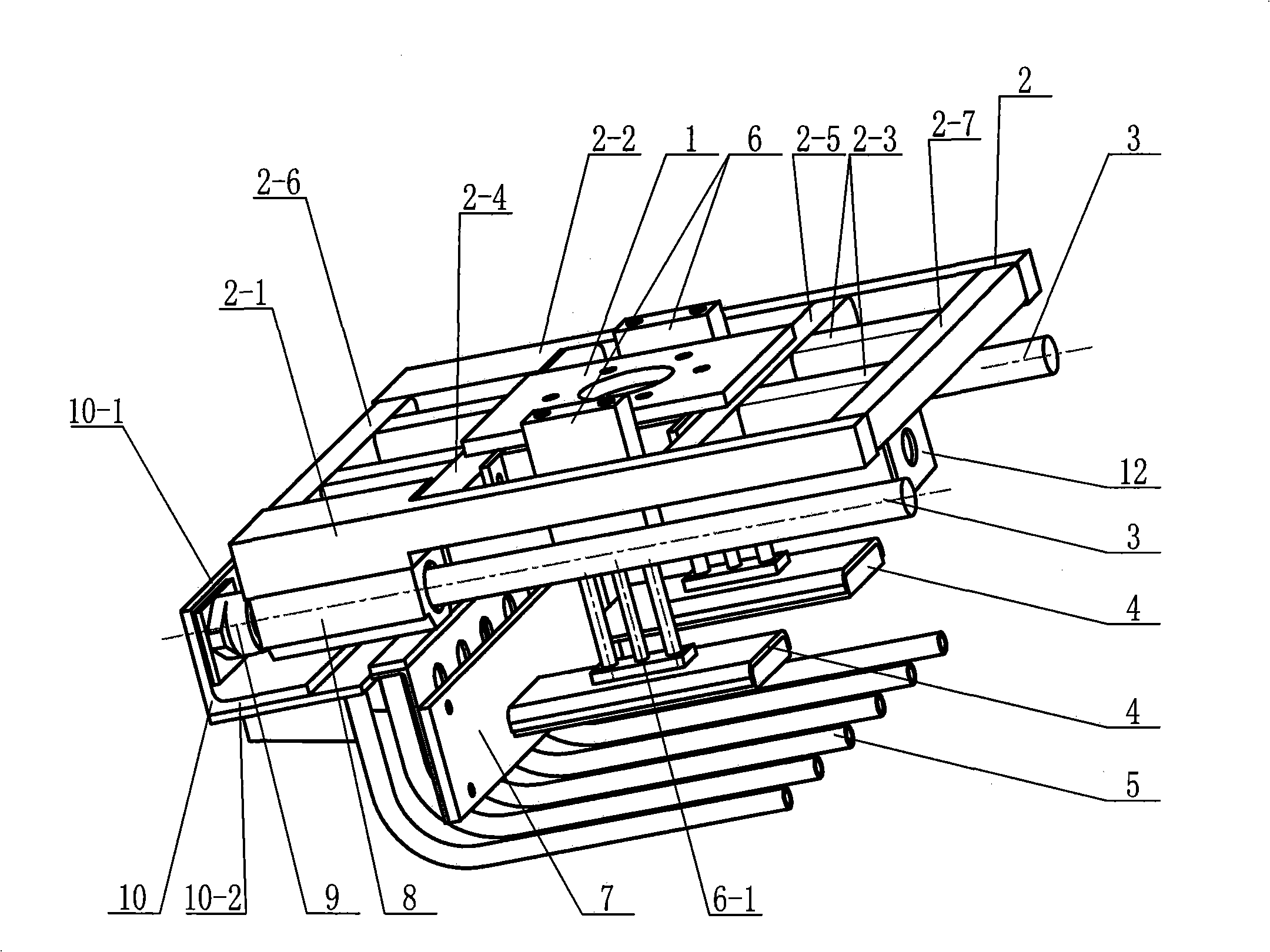
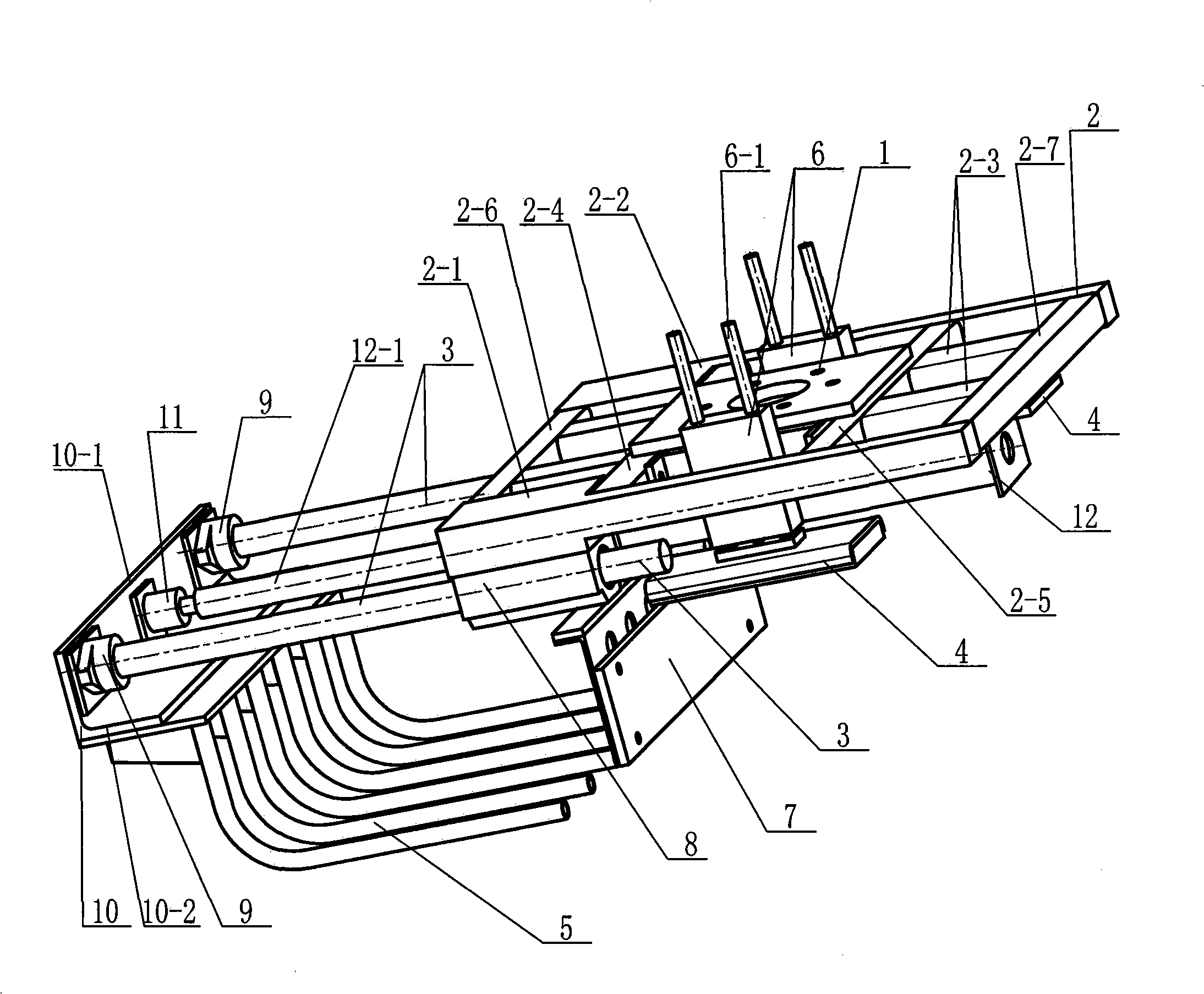
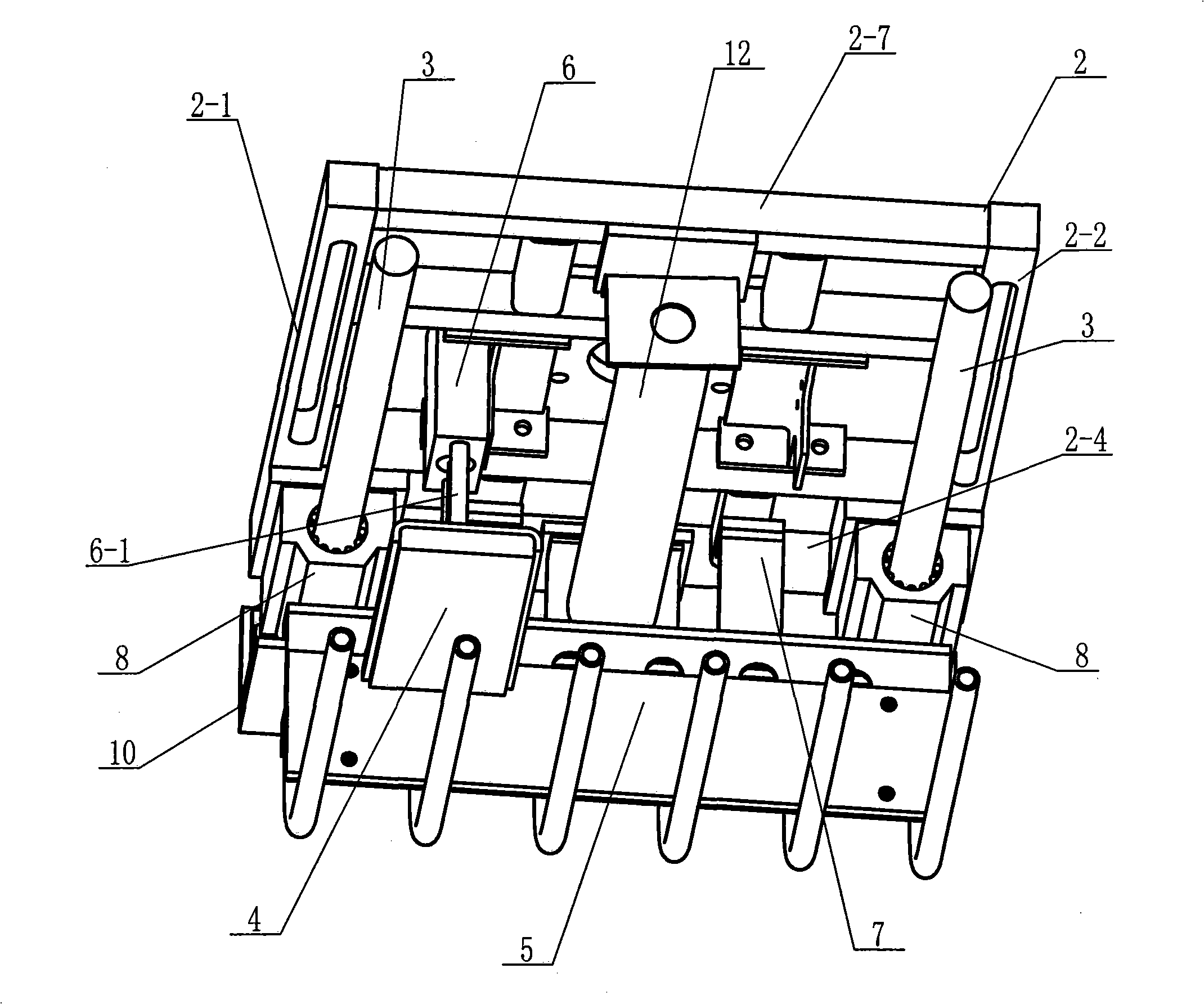
[0007] Specific implementation mode one: combine Figure 1 ~ Figure 3 Describe this embodiment, this embodiment includes flange 1 and frame 2, this embodiment also includes two guide rods 3, two pressure plates 4, support fork 5, two cylinders 6 with guide rods, baffle plate 7, two A linear bearing 8, two supports 9, a bracket 10, a joint 11 and a fork cylinder 12, the flange 1 is installed on the upper end surface of the frame 2, and the two linear bearings 8 are respectively installed on the front of the frame 2 On the lower end faces of the left side of the crossbeam 2-1 and the rear crossbeam 2-2, one ends of the two guide rods 3 pass through two linear bearings 8 respectively and are installed on two supports 9, and the two supports 9 Installed on the right end surface of the vertical plate 10-1 of the support 10 respectively, the two ends of the fork cylinder 12 are respectively installed on the lower end surface of the left longitudinal beam 2-6 and the right longitudin...
specific Embodiment approach 2
[0008] Specific implementation mode two: combination Figure 1 ~ Figure 3 The present embodiment is described. The supporting fork 5 of the present embodiment is composed of 4 to 8 fork rods arranged side by side at equal intervals. Such setting is beneficial to grabbing and stacking operations. Other compositions and connections are the same as in the first embodiment.
specific Embodiment approach 3
[0009] Specific implementation mode three: combination Figure 1 ~ Figure 3 Describe this embodiment, the width of the support fork 5 in this embodiment is equal to the width of the material bag, and the length of the support fork 5 is equal to the length of the material bag. Such setting is beneficial to grabbing and stacking operations. Other compositions and connections are the same as those in the second embodiment.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More