Driving method and system of tandem type hybrid vehicle
A technology for hybrid vehicles and driving methods, applied in hybrid vehicles, motor vehicles, transportation and packaging, etc., can solve problems such as poor fuel economy, achieve the effects of reducing fuel consumption, improving fuel economy, and reducing energy loss
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
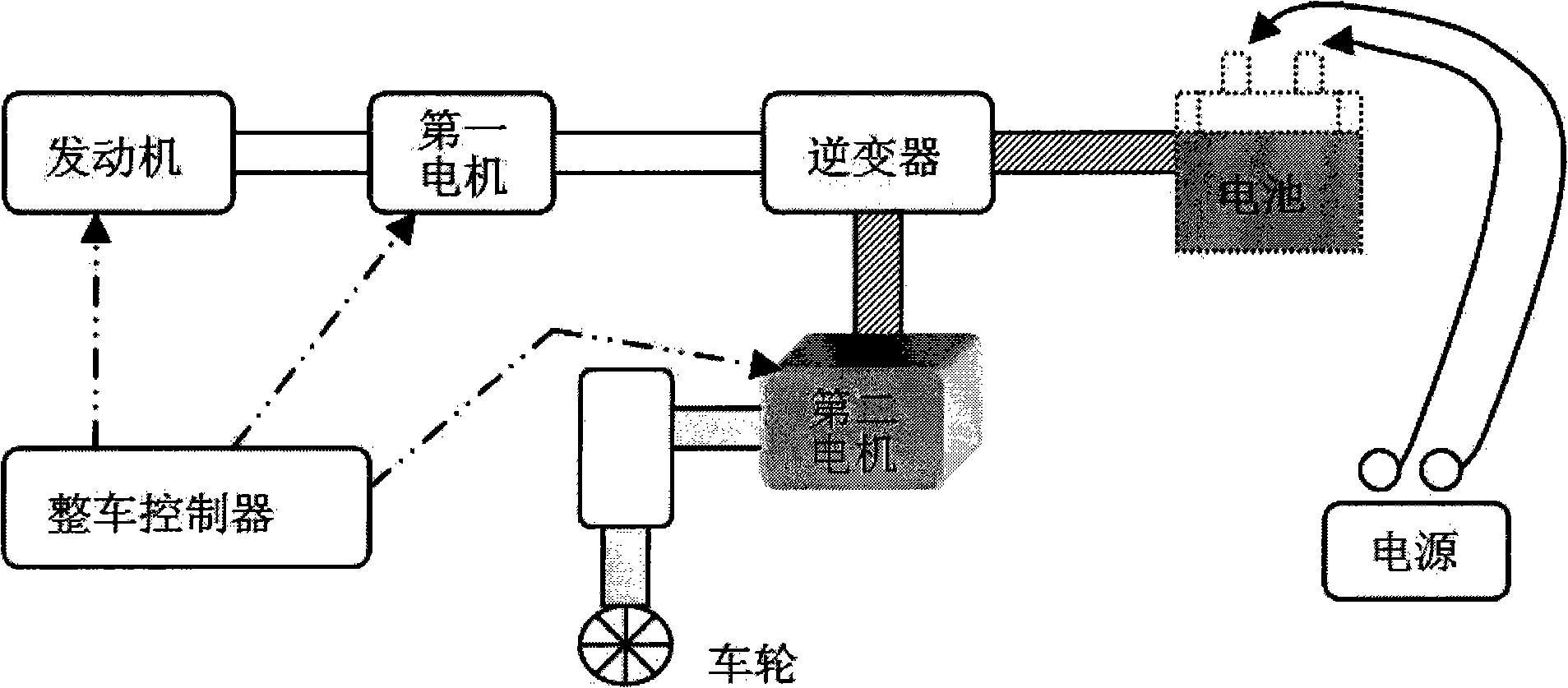
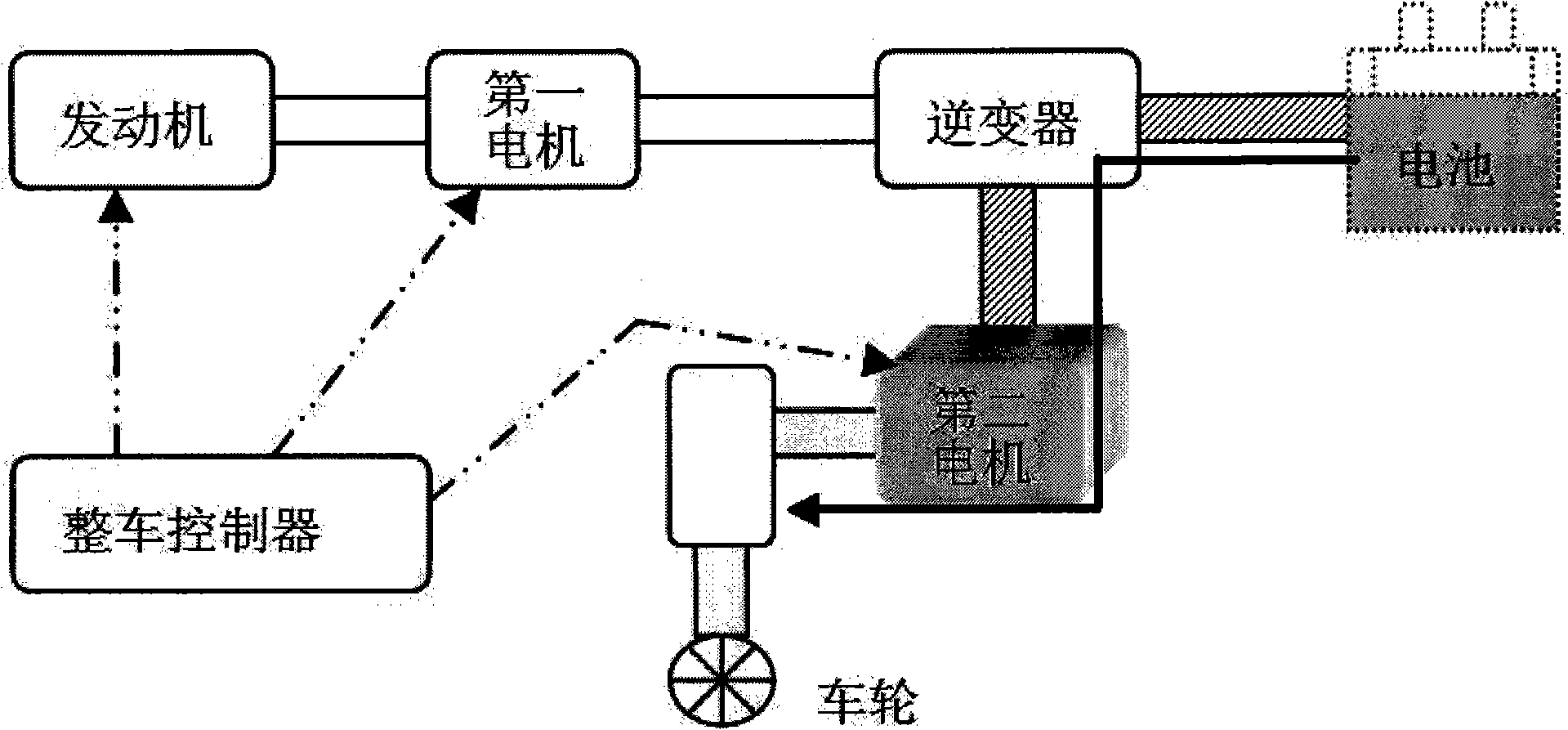
[0016] Such as figure 1 As shown, the drive system of a series hybrid vehicle includes an engine, a first motor (used as a generator), an inverter, and a battery connected in sequence, and a second motor (used as a motor) connected to the battery through the inverter The second motor is connected to the wheels through a speed change mechanism (not shown) to provide power for the vehicle to drive it to travel. The vehicle controller can control the engine, the first motor, and the second motor at the same time, and control their start and stop. In addition, the battery can also be charged by the power supply.
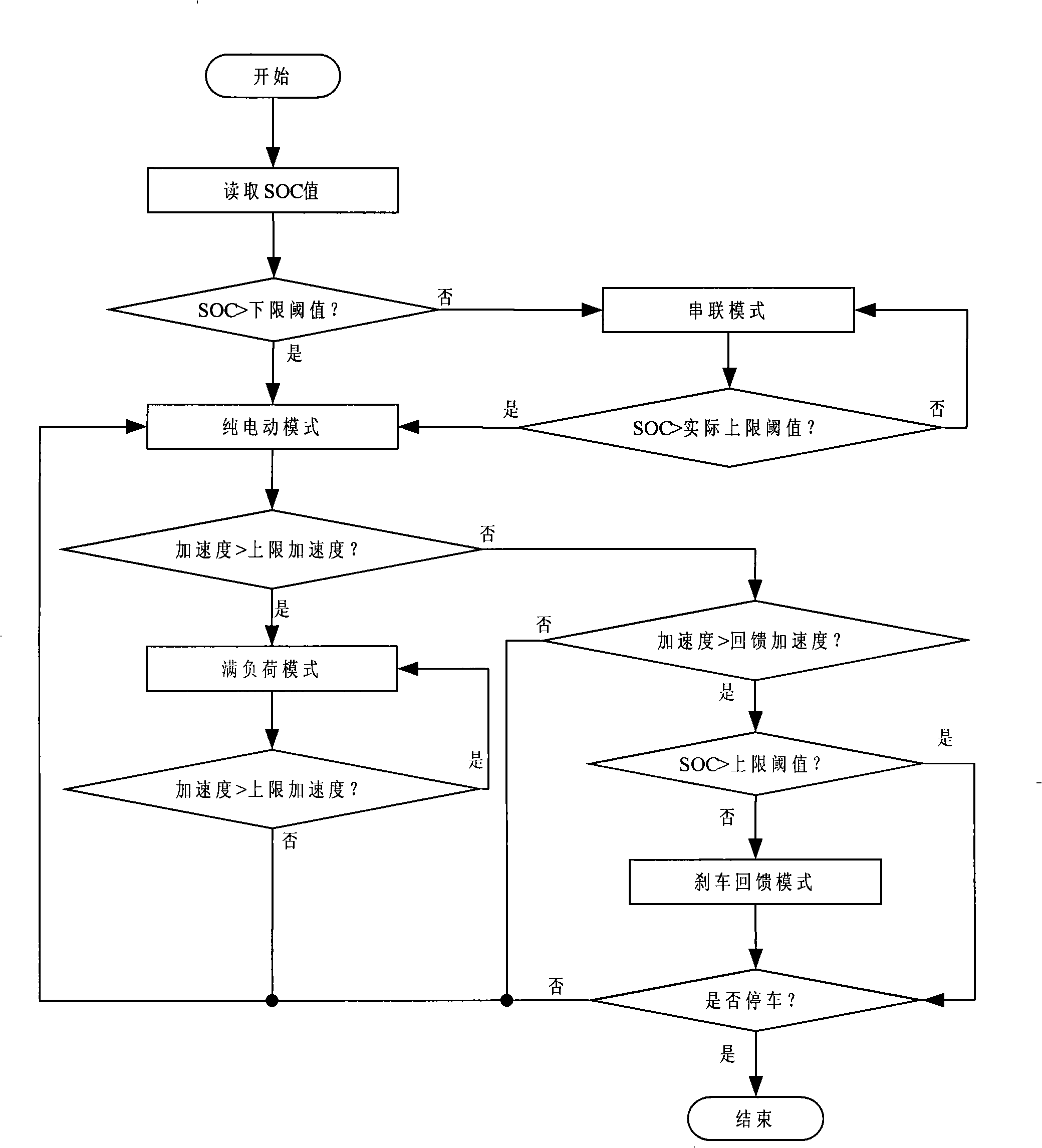
[0017] The driving method of a series hybrid vehicle provided by the present invention includes: driving a vehicle in a driving state, wherein, when the battery charge is greater than a lower limit threshold and the acceleration is not greater than the upper limit acceleration, the battery supplies power to the motor to drive the motor The vehicle is running and the engine ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More