

Low speed friction servo system sliding-mode variable structure control method based on grey prediction device
A sliding mode variable structure and servo system technology, applied in the direction of adaptive control, general control system, control/adjustment system, etc., can solve the problem of weakening the high-frequency chattering of the control signal, and achieve the effect of simplifying the low-speed friction servo system
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
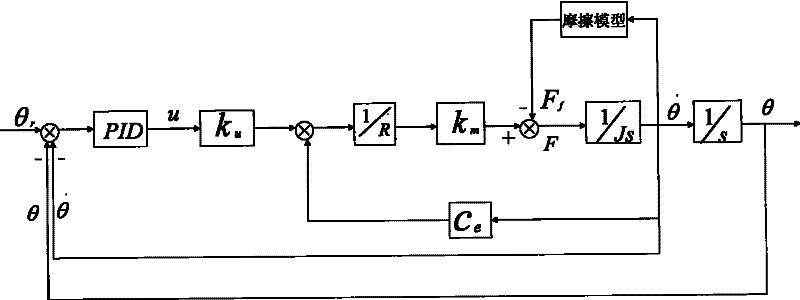
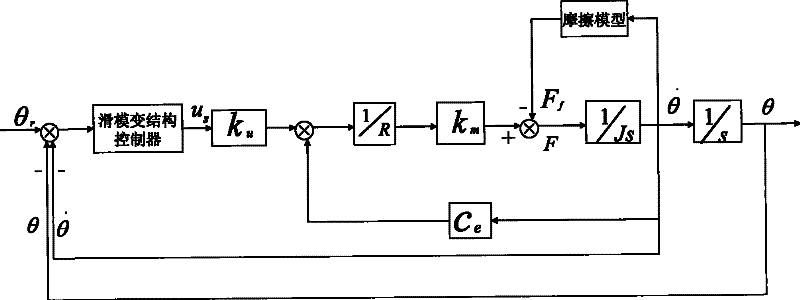
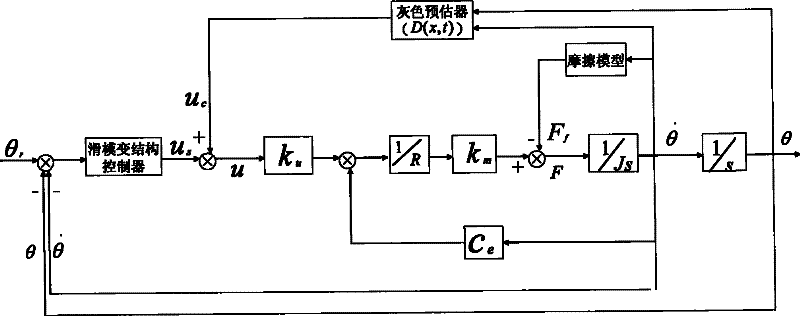
[0101] A preferred embodiment of the present invention is described below with reference to the drawings: see image 3 with Figure 4 , The sliding mode variable structure control method of low-speed friction servo system based on gray predictor is to use gray control theory to roughly estimate the uncertain part of the servo system and the unknown external disturbance model parameters after the servo system is started. Certain compensation is given to the determined part and external interference, and the gray predictive compensation part and the sliding mode variable structure control part are involved in the control of the servo system, which specifically includes two stages: the first stage, the sliding mode variable structure with exponential approach rate Control the servo system. At the same time, use gray control theory to estimate the uncertain part of the servo system and the unknown external disturbance model parameters; the second stage, after the required number of st...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More