

Method for recognizing position and attitude of space plane object
A technology of planar objects and recognition methods, which is applied in the field of image processing, can solve the problems of limited scope of application and harsh conditions, and achieve the effects of weakening conditional limitations, good robustness, and expanding the scope of application
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The technical solutions of the present invention will be further elaborated below in conjunction with the accompanying drawings and specific embodiments.
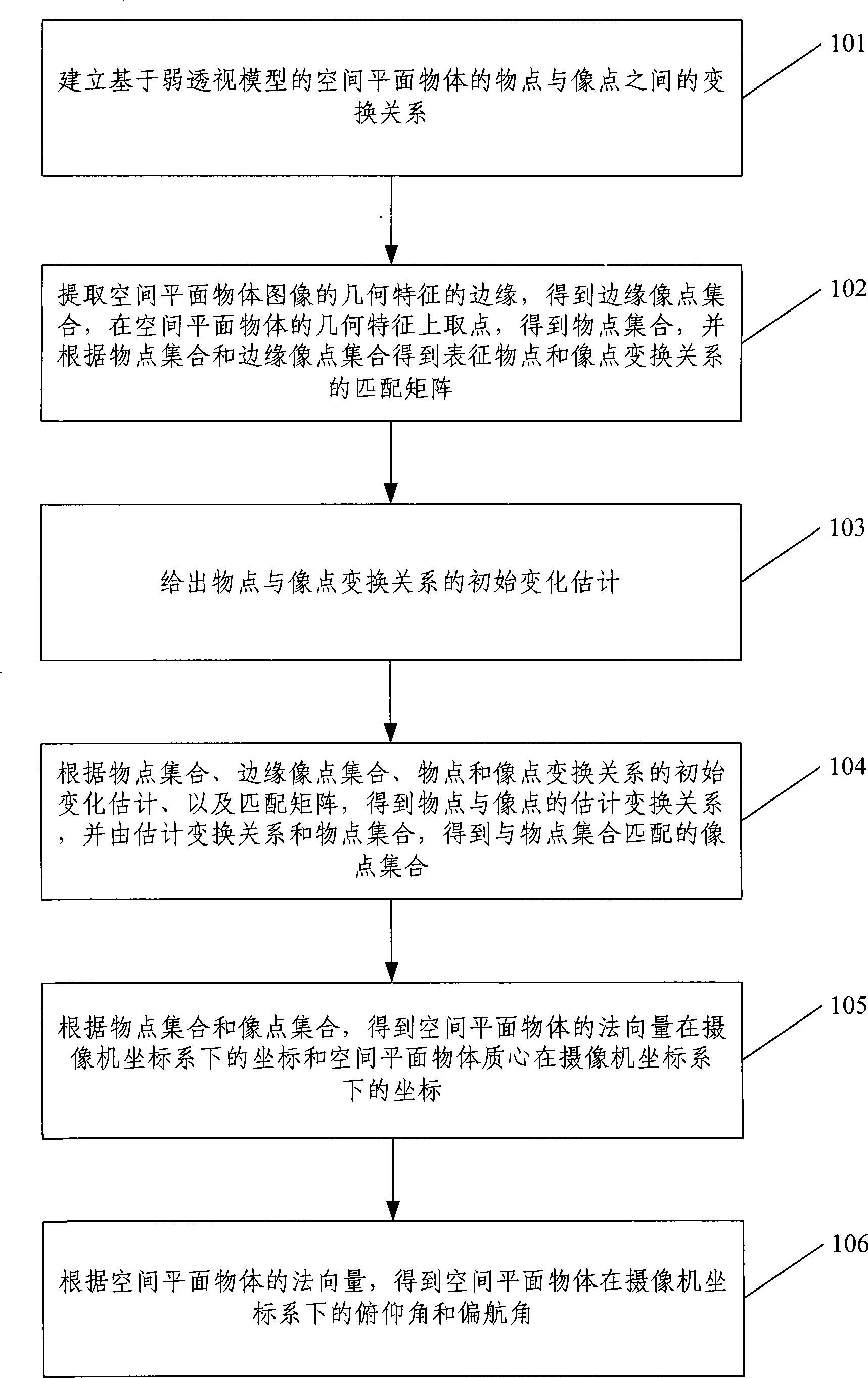
[0038] The scheme of the present invention is carried out under the condition that the matching between the object point and the image point is unknown, and is applicable to any spatial plane object satisfying weak perspective. Such as figure 1 As shown, the present invention's spatial plane object pose recognition method mainly includes the following steps:
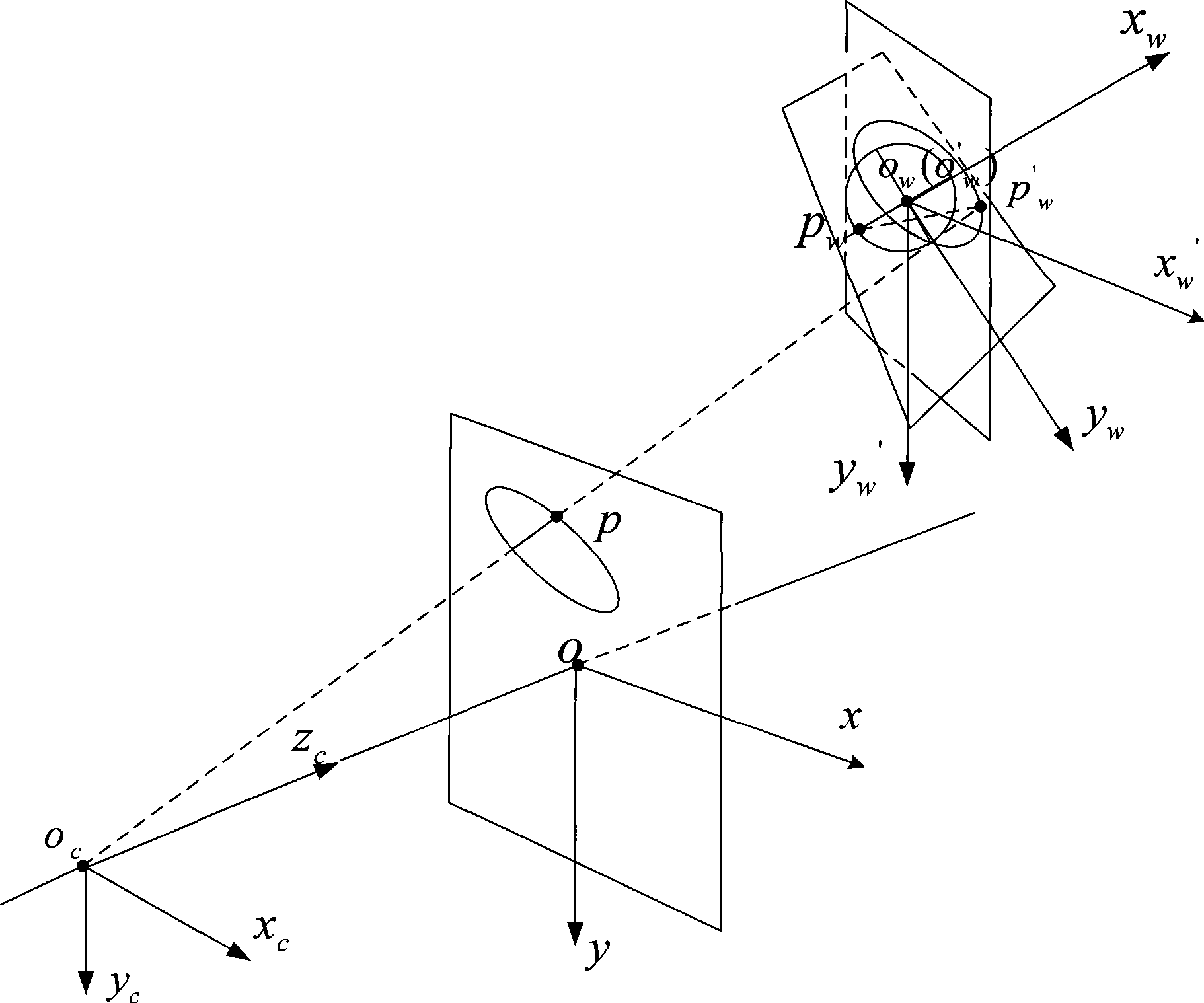
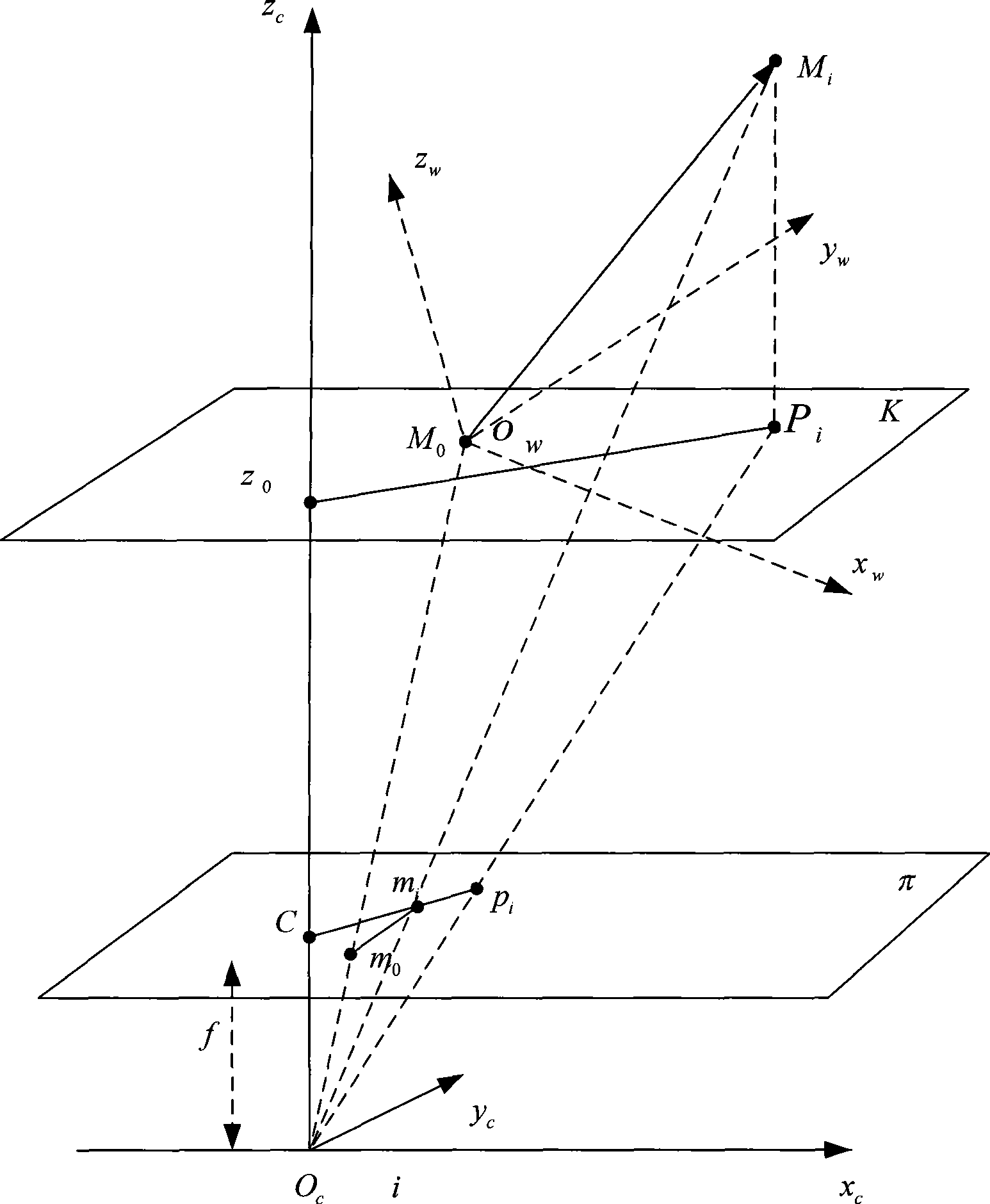
[0039] Step 101, establishing a transformation relationship between object points and image points of a spatial plane object based on a weak perspective model.
[0040] Here, the transformation relationship between the plane object point and the image point based on weak perspective is established, transforming {A, B}, where A is a 2×2 affine transformation matrix, and B is a 2×1 vector, representing the image of the center of mass of the object point coordin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More