

Hand-eye type robot movable target extracting method with low servo accuracy based on visual sensation
A technology for moving targets and robots, which is applied in the field of hand-eye low-servo-precision robot moving target grasping, which can solve problems such as poor grasping accuracy, grasping failure, and overshooting
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments, but not as a limitation of the present invention.
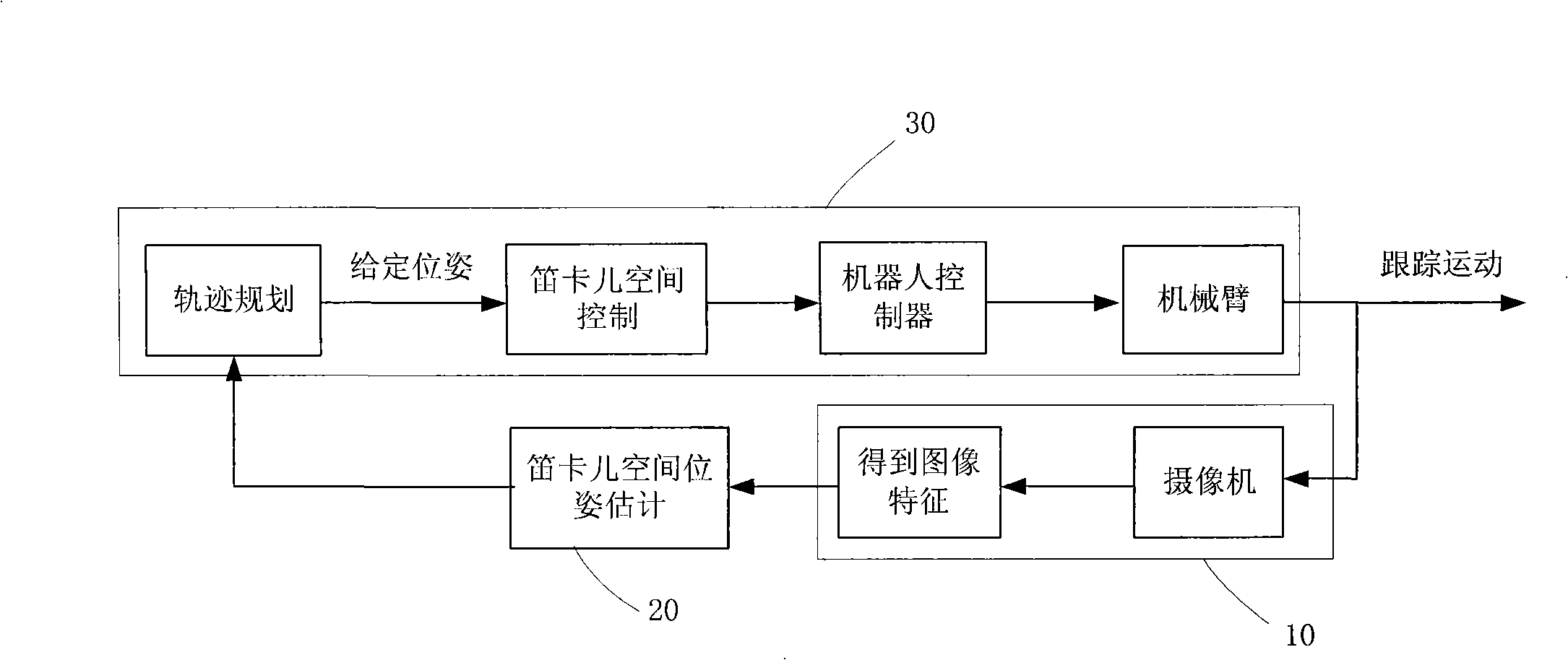
[0023] Such as figure 2 As shown, a vision-based hand-eye low-servo precision robot moving target grasping method is carried out in the following steps:
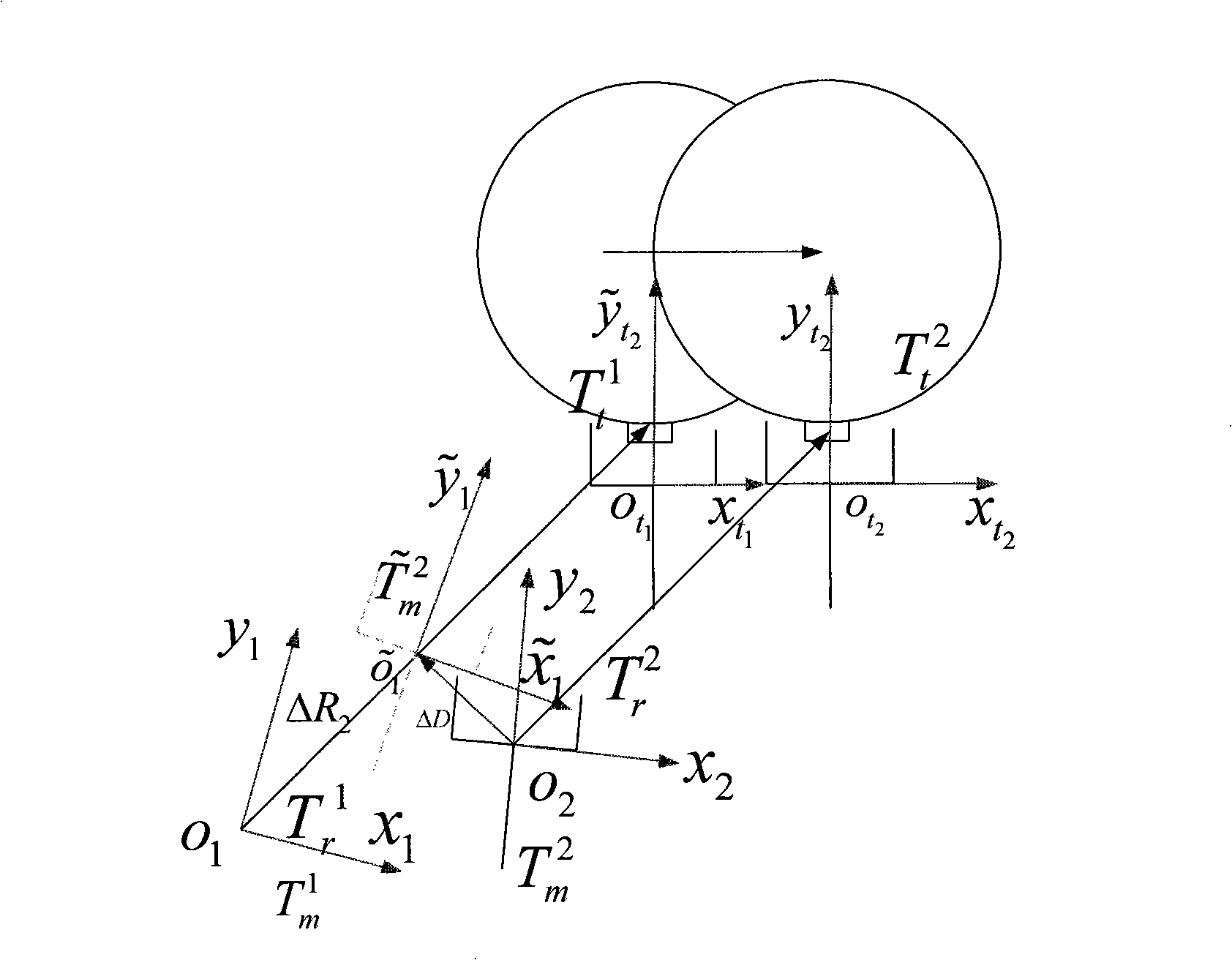
[0024] Step 10 Capture the pose T of the target object relative to the end of the robotic arm through the camera of the hand-eye vision system r That is, the image feature parameter, the current joint angle θ of the manipulator is obtained through the position detection element of the manipulator. From the current joint angle θ of the manipulator, the current pose T of the manipulator can be calculated m , then the pose T of the target object relative to the base coordinate system of the manipulator t =T m T r . Transform the pose of the target object into the form of Euler angles, then the pose of the target object relative to the coor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More