

Mobile robot grating map creating method of real-time data fusion
A mobile robot and grid map technology, applied in physical realization, biological neural network model, road network navigator, etc., can solve the problems of overly sensitive error information, unclear map, high misjudgment rate, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
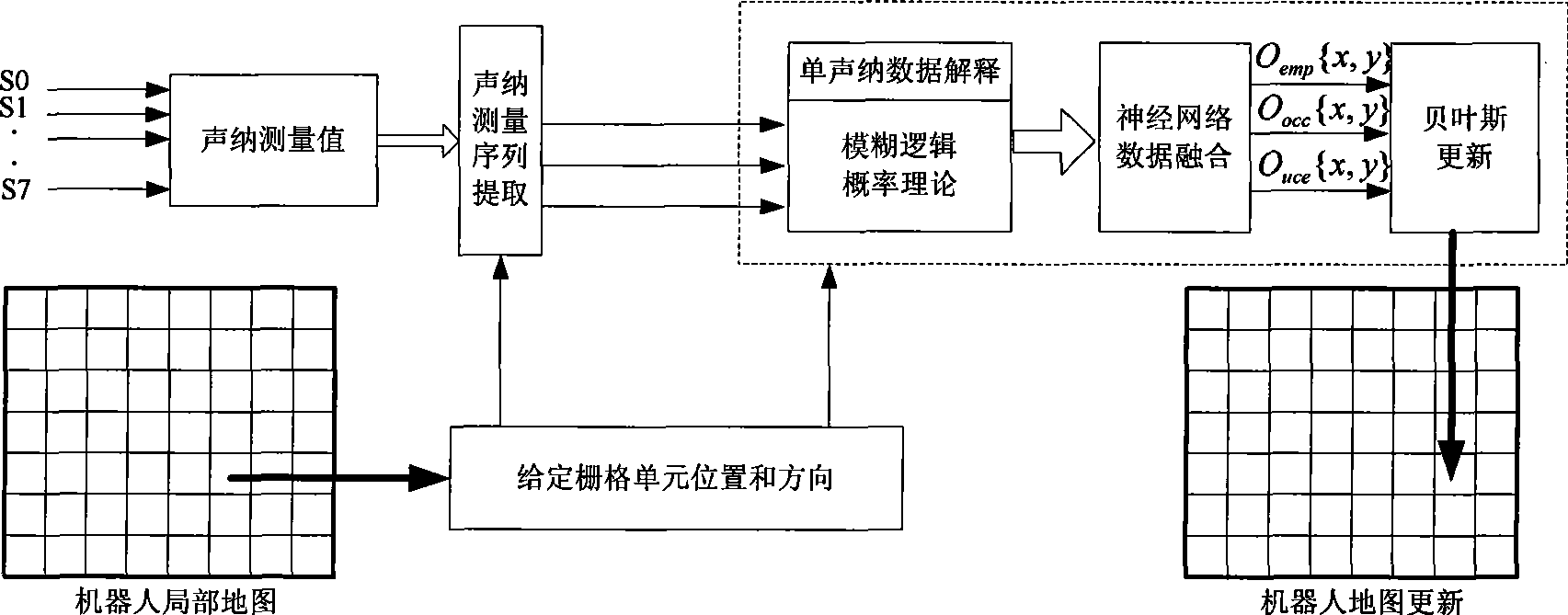
[0056] figure 1 Among them, S0, S1, ..., S7 are the ranging values of the sonar sensors installed on the front end of the mobile robot, and O emp {x, y}, O occ {x, y}, O uce {x, y} are the currently calculated grid idle probability, obstacle probability and uncertain state probability, respectively.
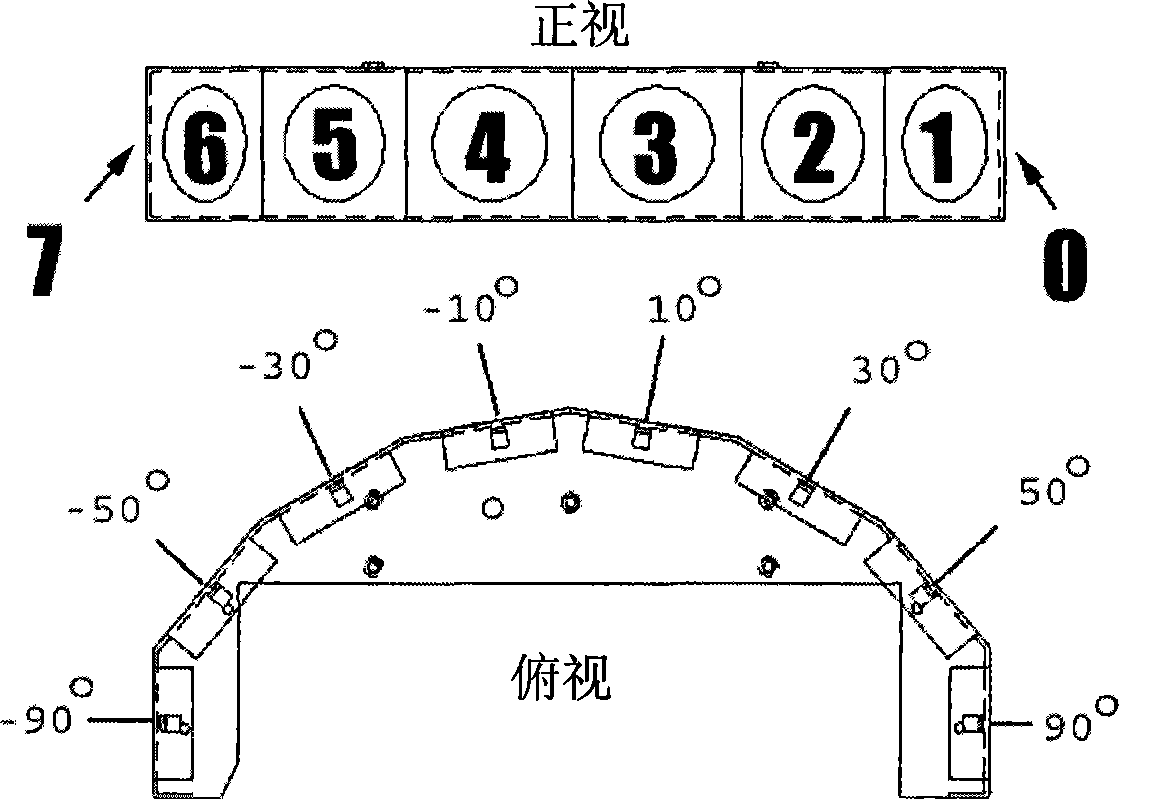
[0057] The mobile robot uses ultrasonic ranging sensors to complete environment modeling, and eight sonar ranging sensors are installed on its front end. figure 2 The positions of the sonar sensors of the mobile robot are: ±10°, ±30°, ±50° and ±90°, which are used to detect information about obstacles in their respective directions.
[0058] When the mobile robot is exploring and traversing the environment, the sonar sensor measurement data sequence and the corresponding global position information of the robot are collected at one time. Then a local reference coordinate system is established with the robot as the center, and a local map is created based on the sonar senso...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More