

Omnidirectional wheel structure
An omnidirectional wheel and hub technology, which is applied in the directions of wheels, transportation and packaging, and vehicle parts, can solve the problems of robot movement direction deviation, large carrying capacity, and spatial layout effects, and achieve the effect of increasing overlap and improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
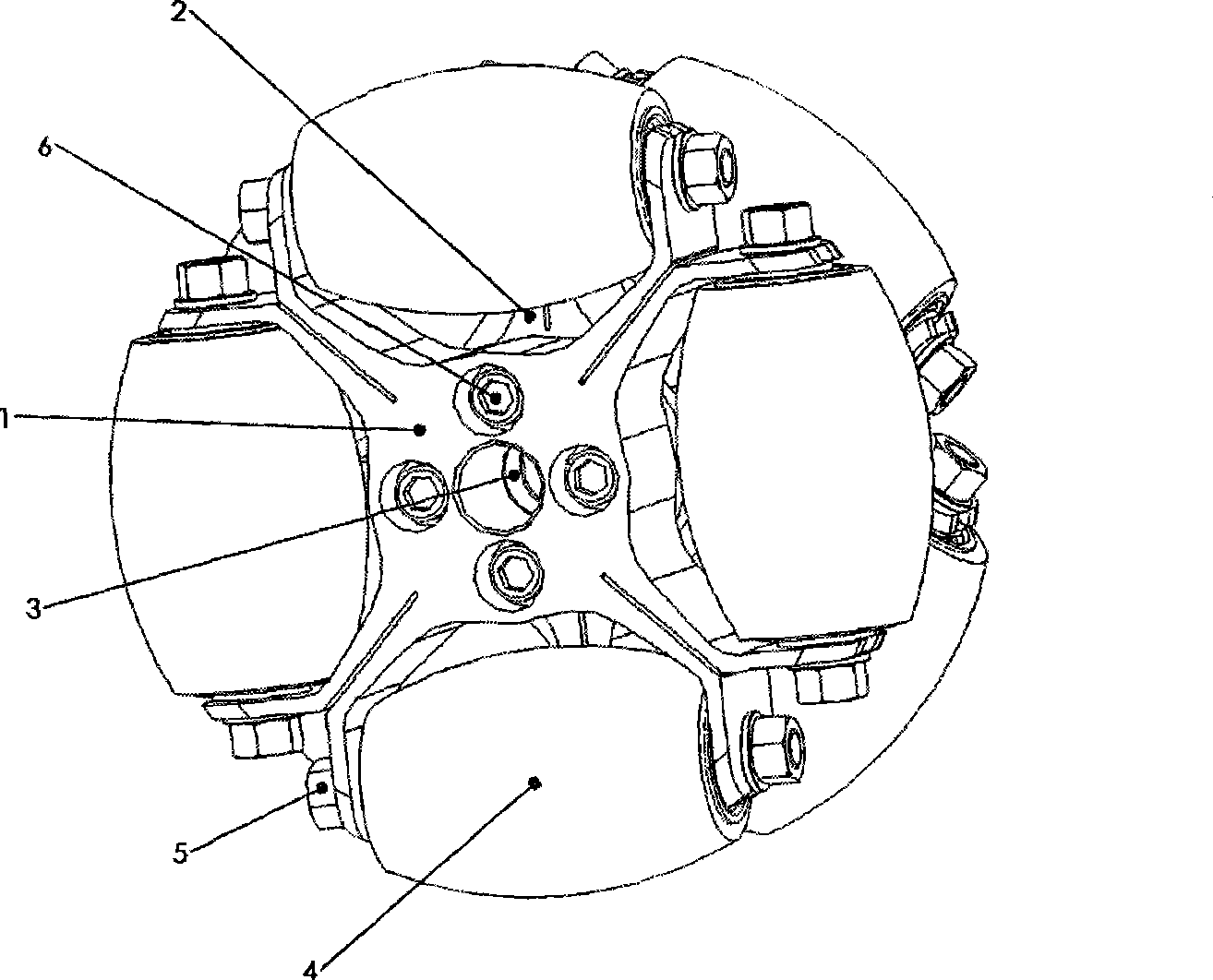
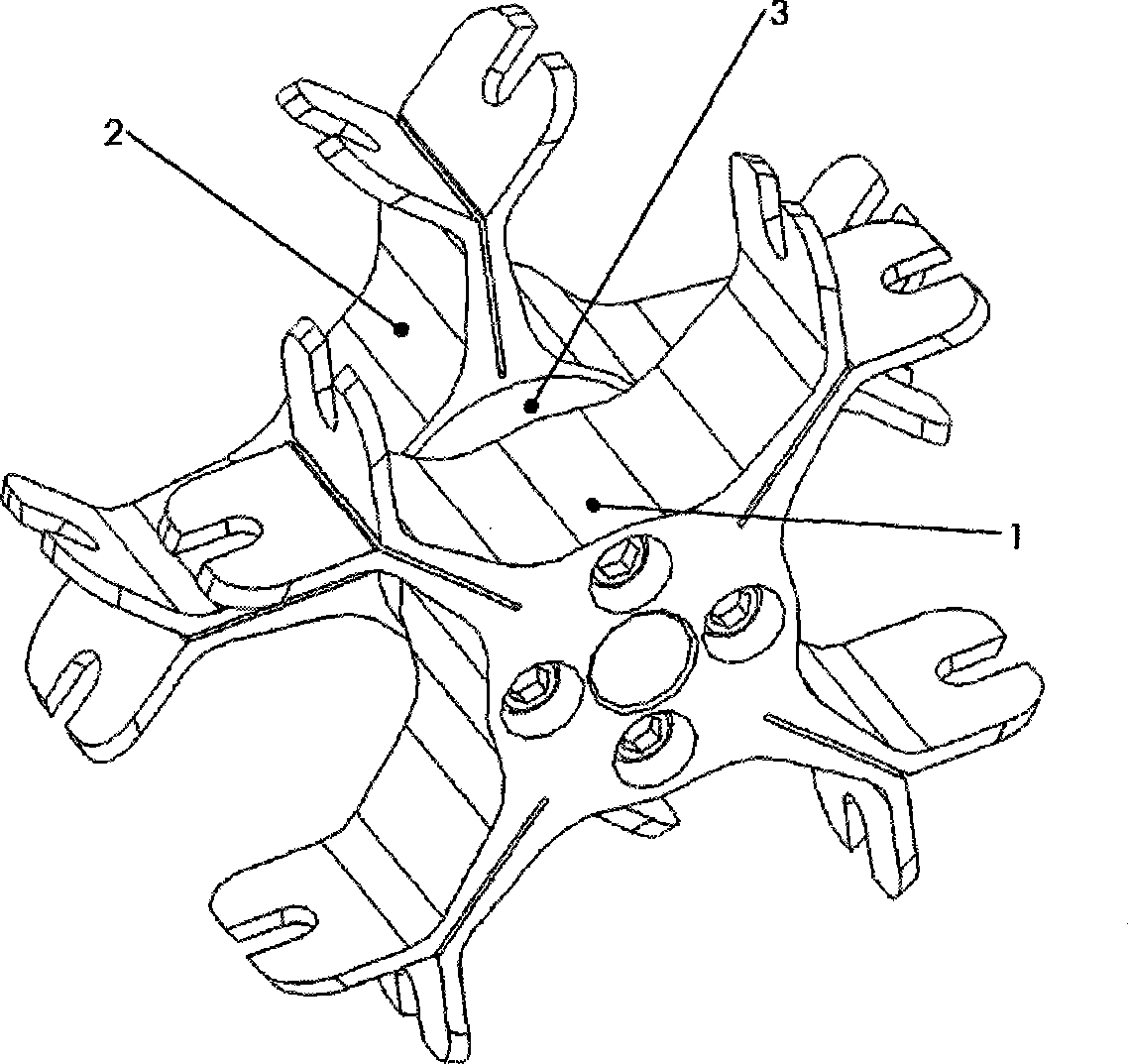
[0020] Shown in Fig. 1 with reference to, omnidirectional wheel is by outer hub support 1, inner hub support 2, spacer 3, spindle small wheel 4, nut 5 five major parts form. The outer hub bracket 1 and the inner hub bracket 2 are staggered at an angle of 45 degrees, with spacers 3 sandwiched between them, and connected by hexagon socket screws 6 (4 in total). Outer hub bracket 1, inner hub bracket 2 edges have U-shaped small grooves, and spindle small wheel 4 (8 in total) is fixed on the inner and outer hub brackets by nuts 5 (16 in total). When the omnidirectional wheel rotates in the radial direction, the spindles of the small wheels touch the ground alternately; when moving axially, the spindles of the small wheels roll laterally, always keeping rolling friction with the ground.
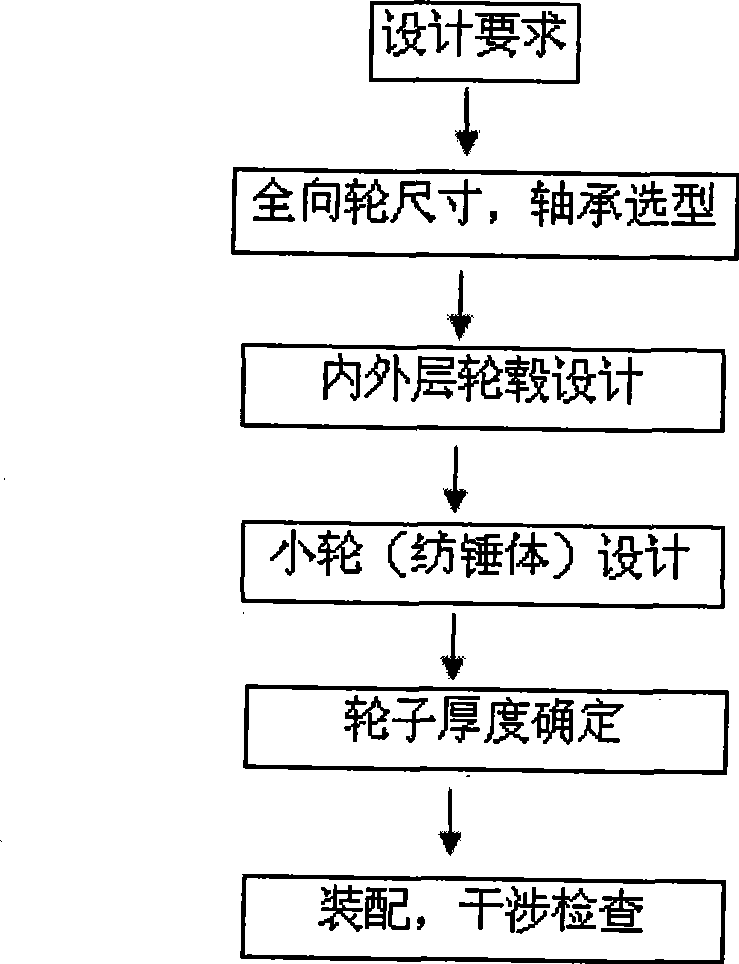
[0021] refer to figure 2 As shown, the flow chart of omnidirectional wheel structure design.
[0022] First determine the size of the omnidirectional wheel according to the design requirements, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More