

Double-mode ground control system for coaxial dual-rotor helidrone
A coaxial dual-rotor, unmanned technology, applied in the field of unmanned remote control system, can solve the problems of no ground control system, slow data processing speed, long training time, etc., to shorten the training time and fast data processing speed , the effect of improving effectiveness and accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0057] Specific embodiments of the present invention will be described below in conjunction with the accompanying drawings.
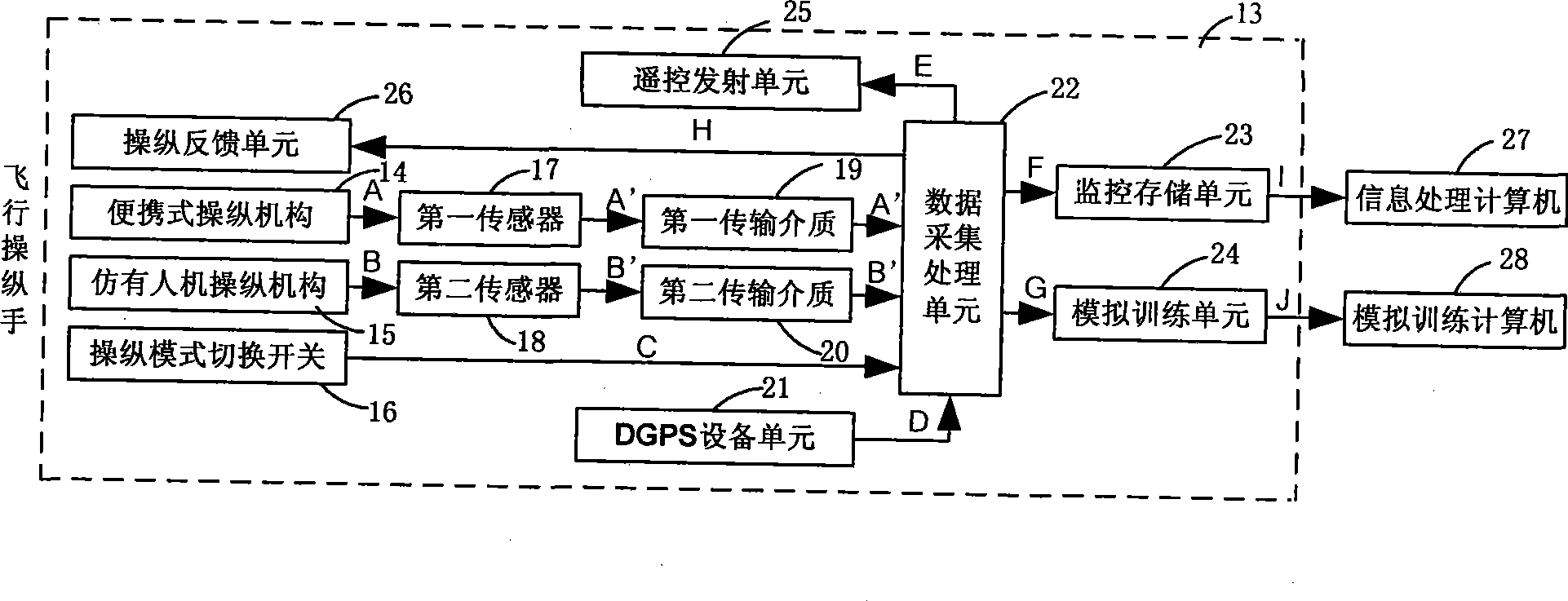
[0058] figure 2 It is a block diagram of the overall structure of the dual-mode ground control system of the present invention. The system generally includes a portable manipulation mechanism 14, a man-machine manipulation mechanism 15, a manipulation mode switch 16, a first sensor 17, a second sensor 18, a first transmission medium 19, a second transmission medium 20, a DGPS device unit 21, a data acquisition The processing unit 22, the monitoring storage unit 23, the simulation training unit 24, the remote control transmitting unit 25 and the manipulation feedback unit 26 are thirteen parts, and the dual-mode ground control system functionally replaces the console of the prior art to realize the remote control system. All functions constitute an important part of the remote control system of the unmanned helicopter ground measurement and control sta...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More