

Method for controlling running of wheeled interplanetary exploration patrol vehicle
A technology for interstellar detection and travel control, applied to extraterrestrial vehicles, motor vehicles, transportation and packaging, etc., can solve problems such as difficult control and complex mechanisms, and achieve the effects of simple structural control, reduced resistance, and improved passing capacity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
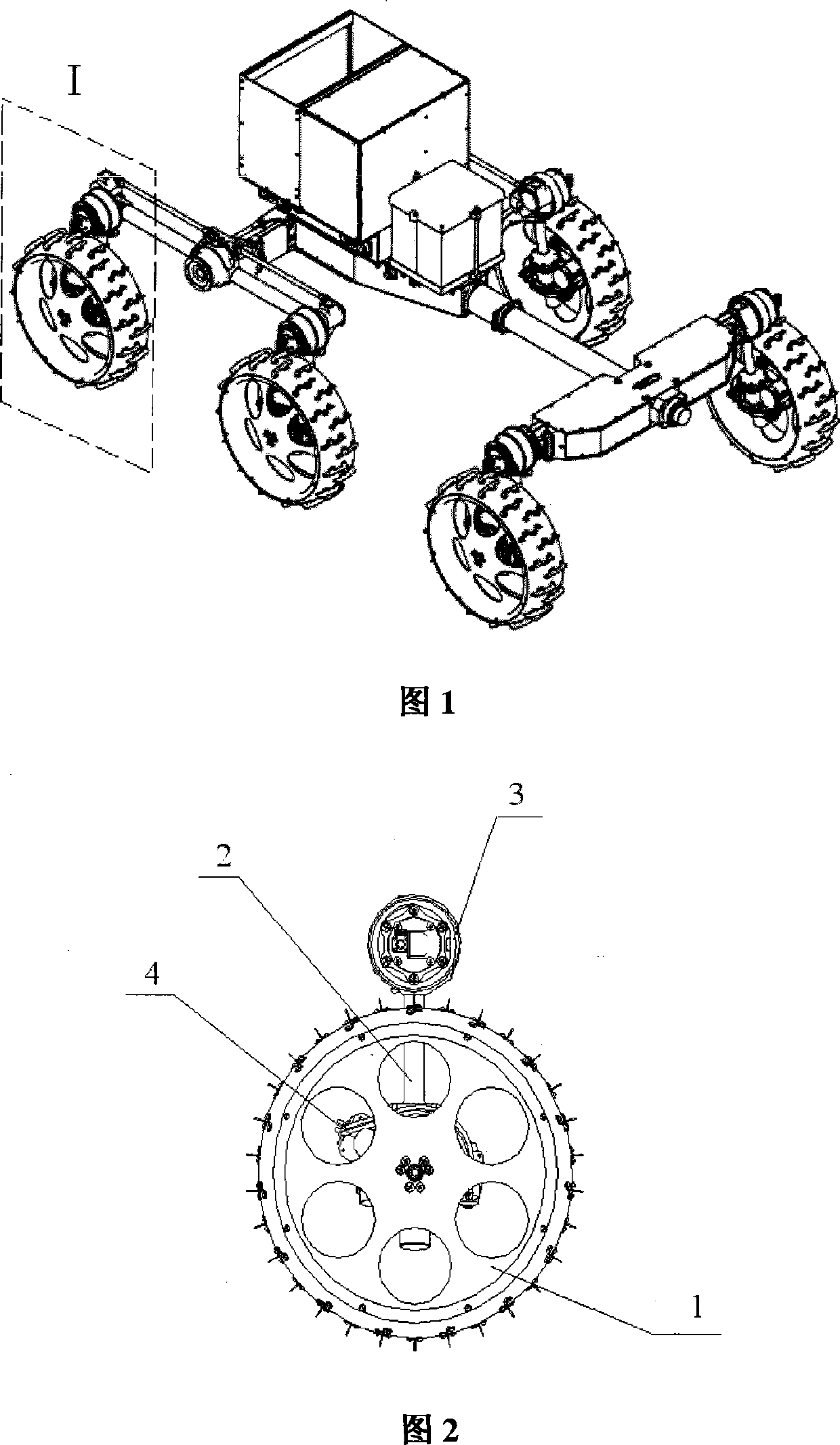
[0041] As shown in Figure 1, the wheeled interstellar exploration patrol vehicle has six wheels, which are respectively arranged on the left and right sides of the vehicle. As shown in Figure 2, each wheel 1 is connected to the vehicle body through a wheel column 2, the vehicle body is provided with a driver 3 for swinging the wheel column, and the connecting end of the wheel column 2 and the wheel 1 is provided with a The drive 4 that makes the wheel 1 rotate.
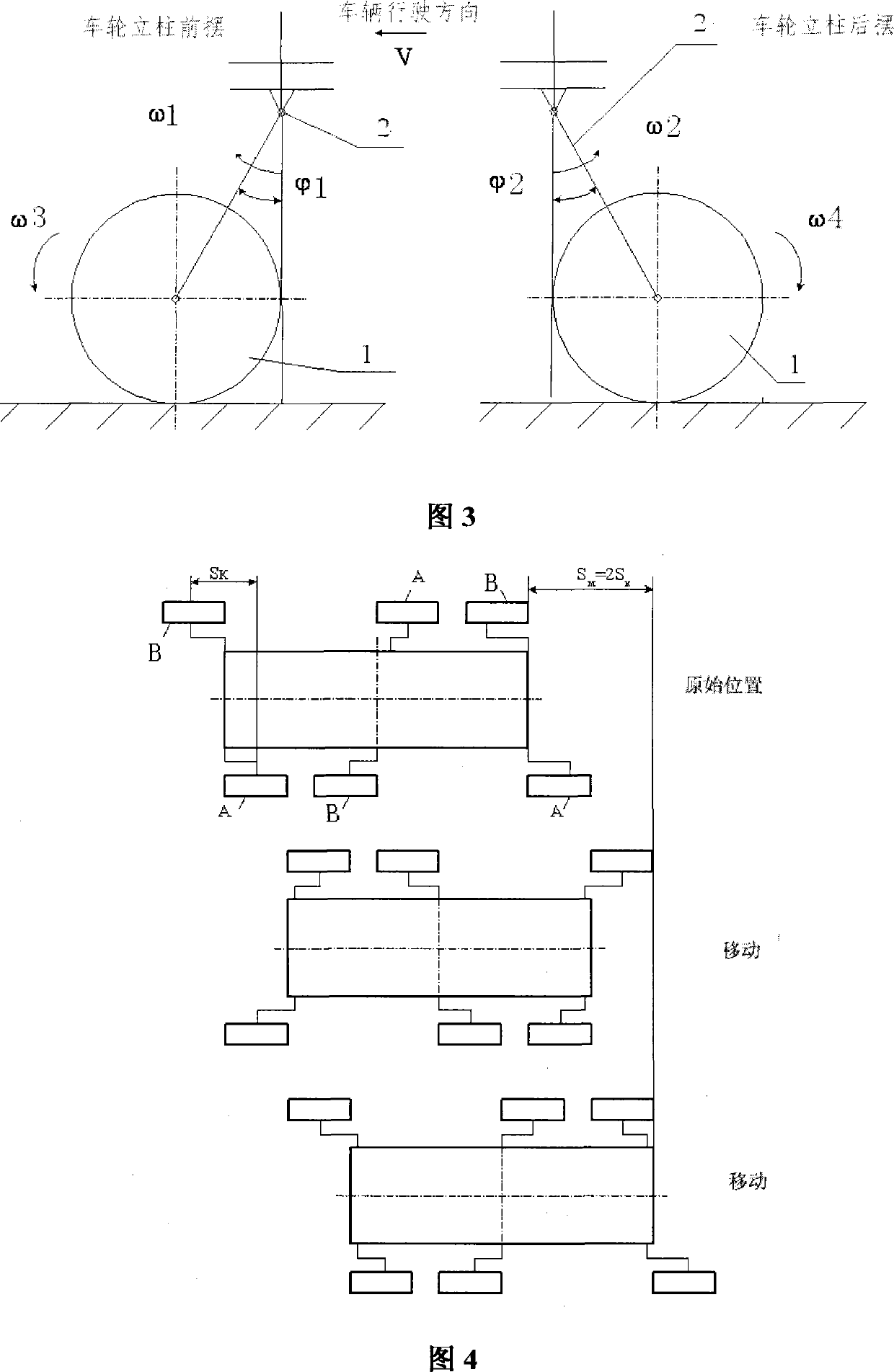
[0042] When controlling the vehicle to walk, when the wheel column swings from back to front, the wheels connected to it roll and rotate forward to reduce the resistance of the swing; when the wheel column swings from front to back, the wheels connected to it stop rotating to increase The thrust of the soil against the wheel. The driving force of the vehicle is realized by using the force difference between the ground and the wheels that swing in two directions.
[0043] As shown in Figure 3, when the wheel column s...
Embodiment 2
[0064] As shown in Figure 1, the wheeled interstellar exploration patrol vehicle has six wheels, which are respectively arranged on the left and right sides of the vehicle. As shown in Figure 2, each wheel 1 is connected to the suspension system through the wheel column 2, the suspension system is provided with a driver 3 for swinging the wheel column, and a driver 3 is provided at the connection end of the wheel column 2 and the wheel 1 to make the wheel 1 rotate. drive 4.
[0065] When the vehicle is controlled to walk, when the wheel column swings from back to front, the wheels connected to it roll and rotate forward; when the wheel column swings from front to back, the wheels connected to it stop rotating.
[0066] As shown in Figure 3, when the wheel column swings forward, the angular velocity of the wheel column swing has the following relationship with the rotation speed of the wheel connected to it:
[0067] As shown in Figure 3, when the wheel column swings back, t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More