Mobile robot and obstacle surmounting method thereof
A mobile robot and robot technology, applied in motor vehicles, tracked vehicles, transportation and packaging, etc., can solve the problem of insufficient ability of robots to overcome obstacles, and achieve the effect of improving the ability to overcome obstacles, large friction coefficient, and not easy to slide down.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be described in further detail below in conjunction with the accompanying drawings.
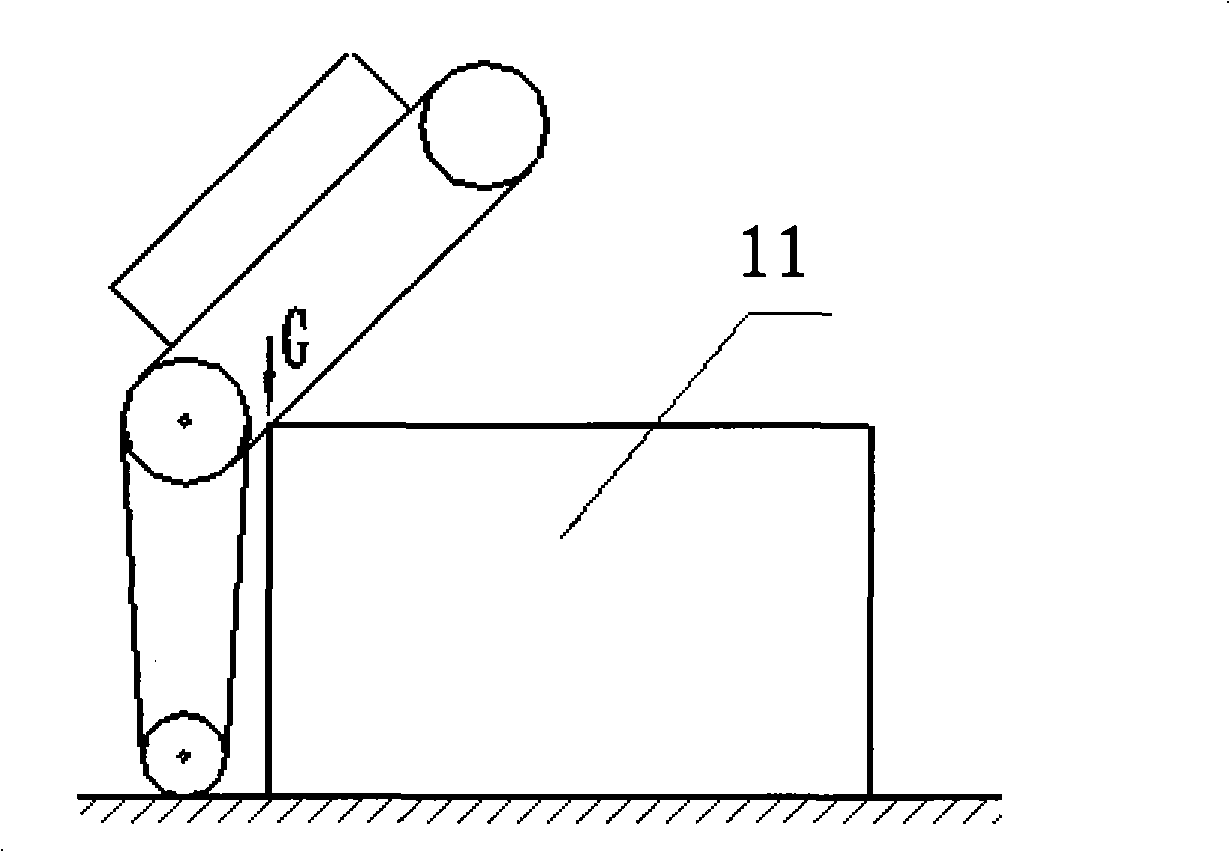
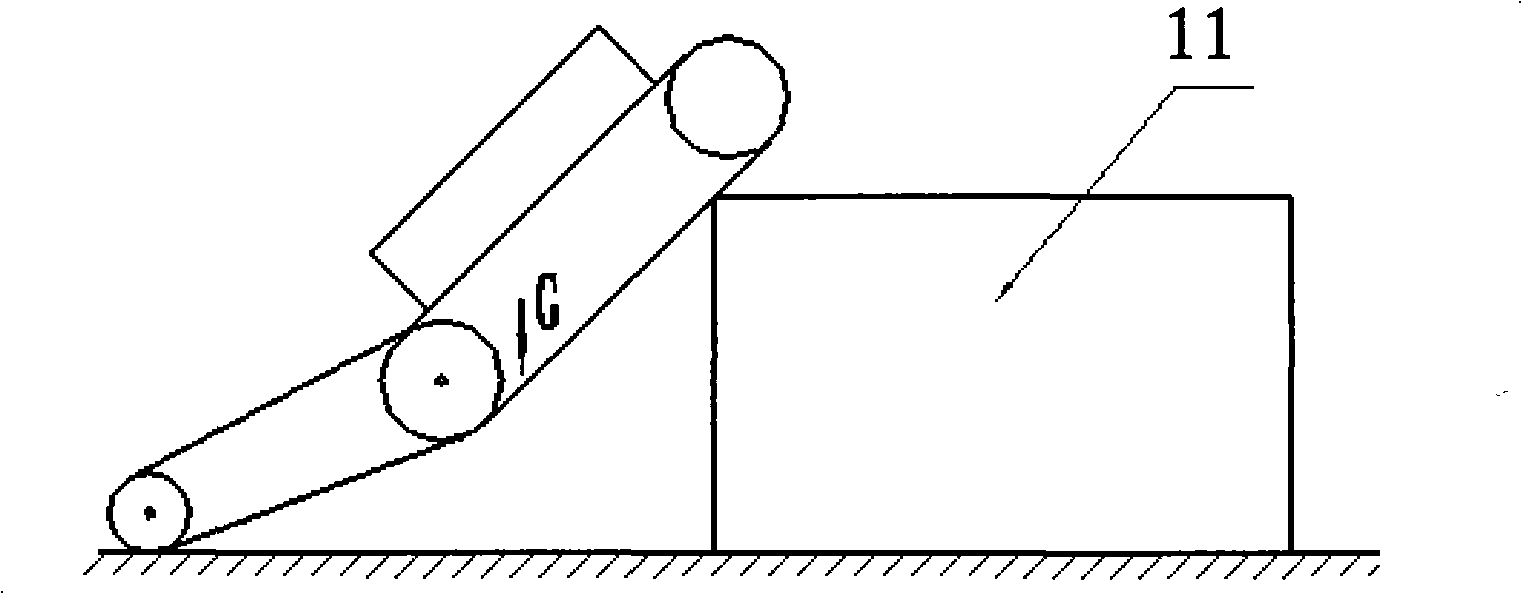
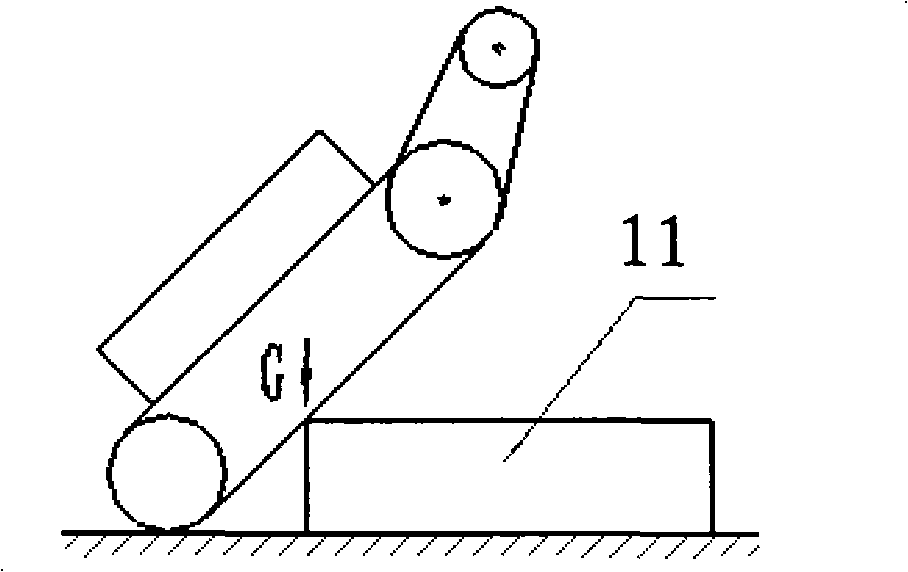
[0028] Such as Figure 4 , Figure 5 As shown, the mobile robot of the present invention is a swing rod type single-section crawler mobile robot. The center of gravity of the robot is on the box body supported by the crawler belt. Front and rear pulleys 3,7 connected by crawler belt 4. The front end in the casing 2 is provided with two pulley motors 1, which are connected with the front pulleys 3 on both sides of the casing through output shafts respectively, and drive the front pulleys 3 to rotate. In order to contribute to the rotation of the front pulley 3, a bearing is installed between the two front pulleys 3 and the output shaft of the pulley motor 1 respectively, and is sleeved on the output shaft of the motor. The rear end at casing 2 is provided with swing leg rotating shaft 9, and it passes by casing 2 and the rear pulley 7 of this end, and swing...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com