

Crank block type under-actuated robot finger device
A crank slider and underactuated technology, which is applied in the field of anthropomorphic robot hands, can solve the problems of large contact stress, large mechanical impact, and many transmission parts, and achieve the effects of low processing cost, easy maintenance, and reduced control system requirements
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The specific structure, working principle and working process of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
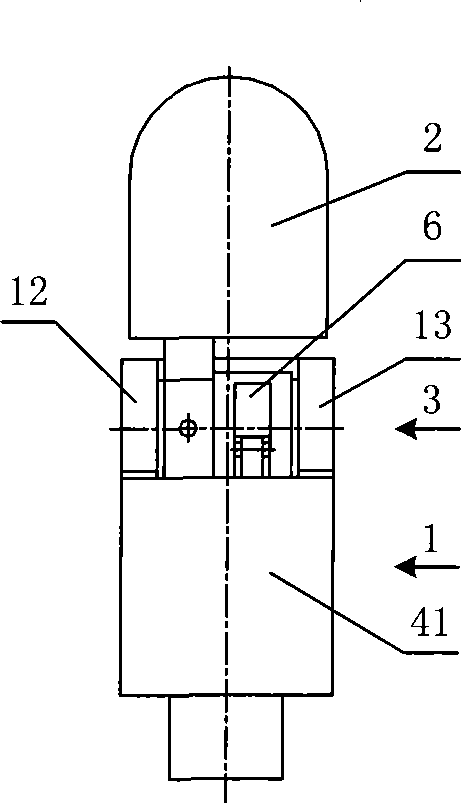
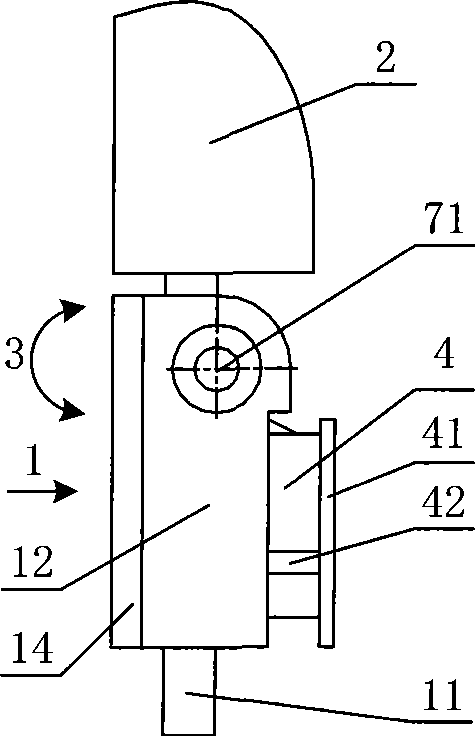
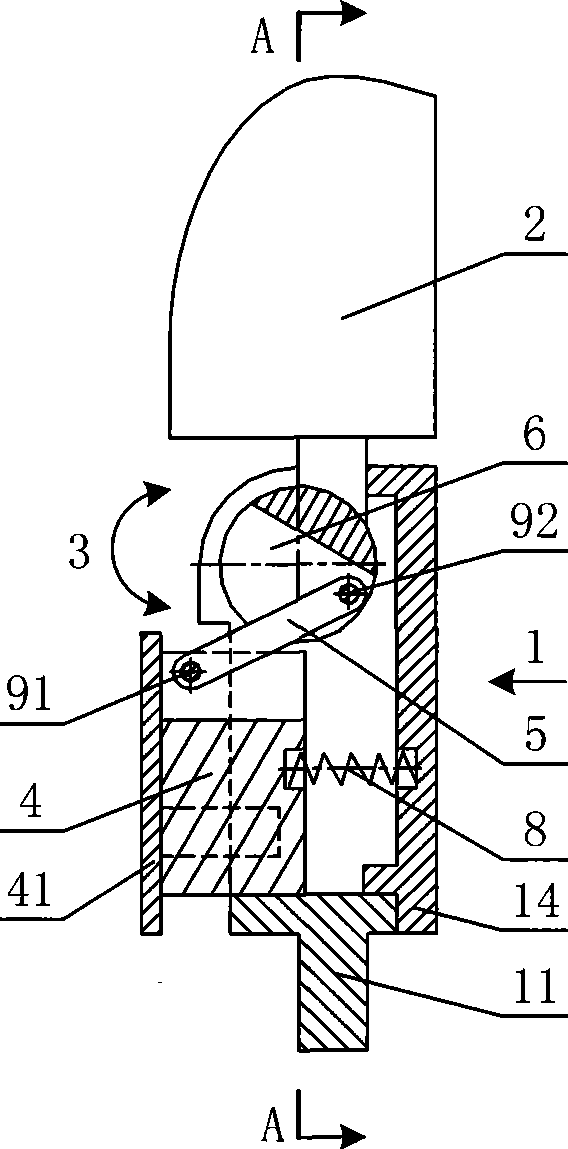
[0040] An embodiment of a slider crank type underactuated robot single-joint finger device designed by the present invention, the appearance of which is as follows figure 1 , 2 As shown, the cross-sectional view is as image 3 , 4 As shown, some parts such as Figure 5 , 6 , 7, the action principle is as follows Figure 8 , 9, 10, 11, 12, 13, 14, 15, 16, 17. This embodiment includes a first finger section 1, a second finger section 2 and an underactuated joint 3 arranged between the two, the underactuated joint includes an active slider 4, a joint shaft 7 and a spring 8; the described The joint shaft 7 is sleeved in the first finger segment 1, the second finger segment 2 is sleeved on the joint shaft 7, the spring 8 is arranged in the first finger segment 1, and the two en...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More