

Robot arm for operation
A surgical robot and arm technology, applied in the direction of anatomical instruments, etc., can solve the problems of complex structure and complex processing, and achieve the effect of small size, flexible operation and compact structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
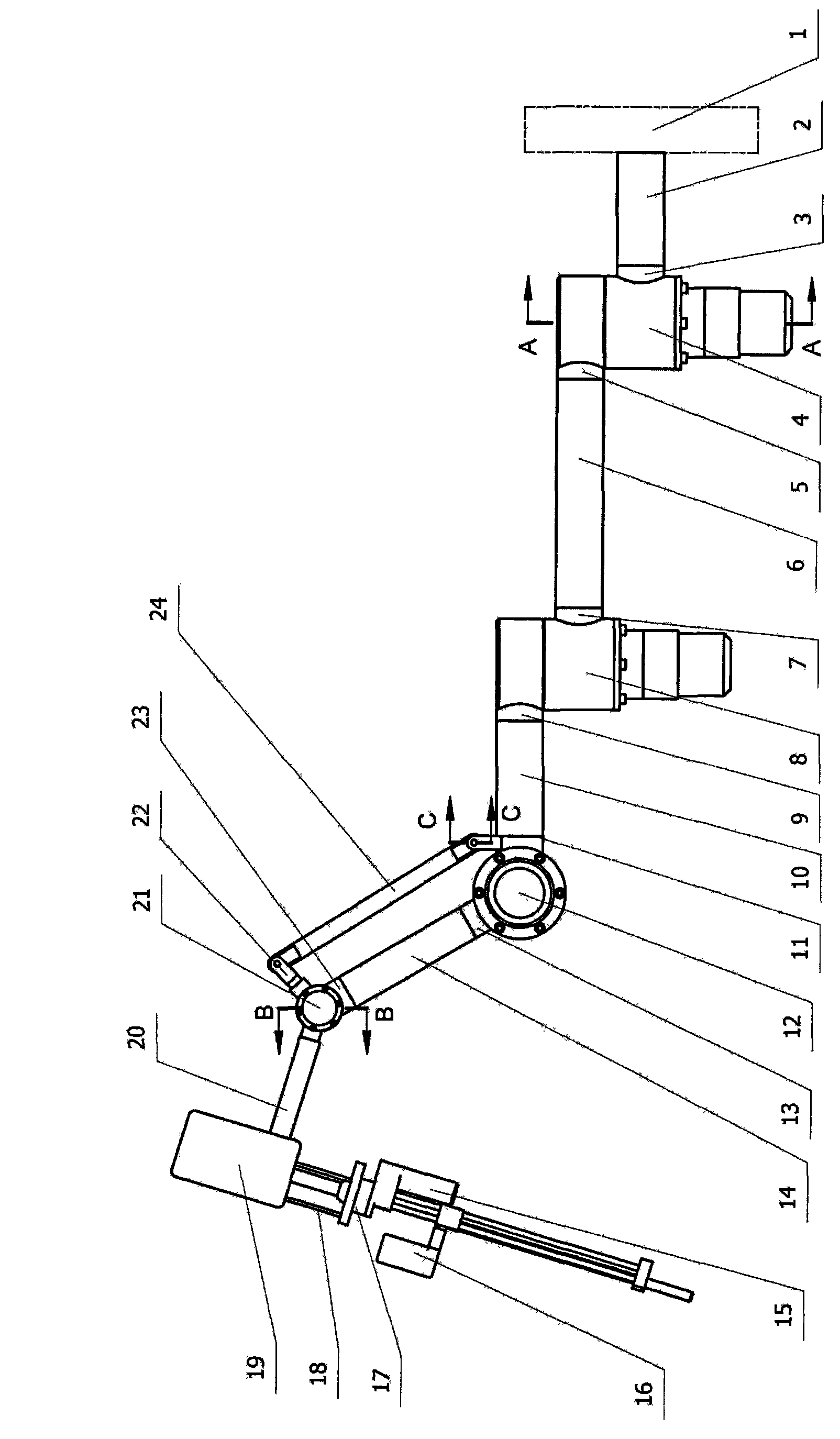
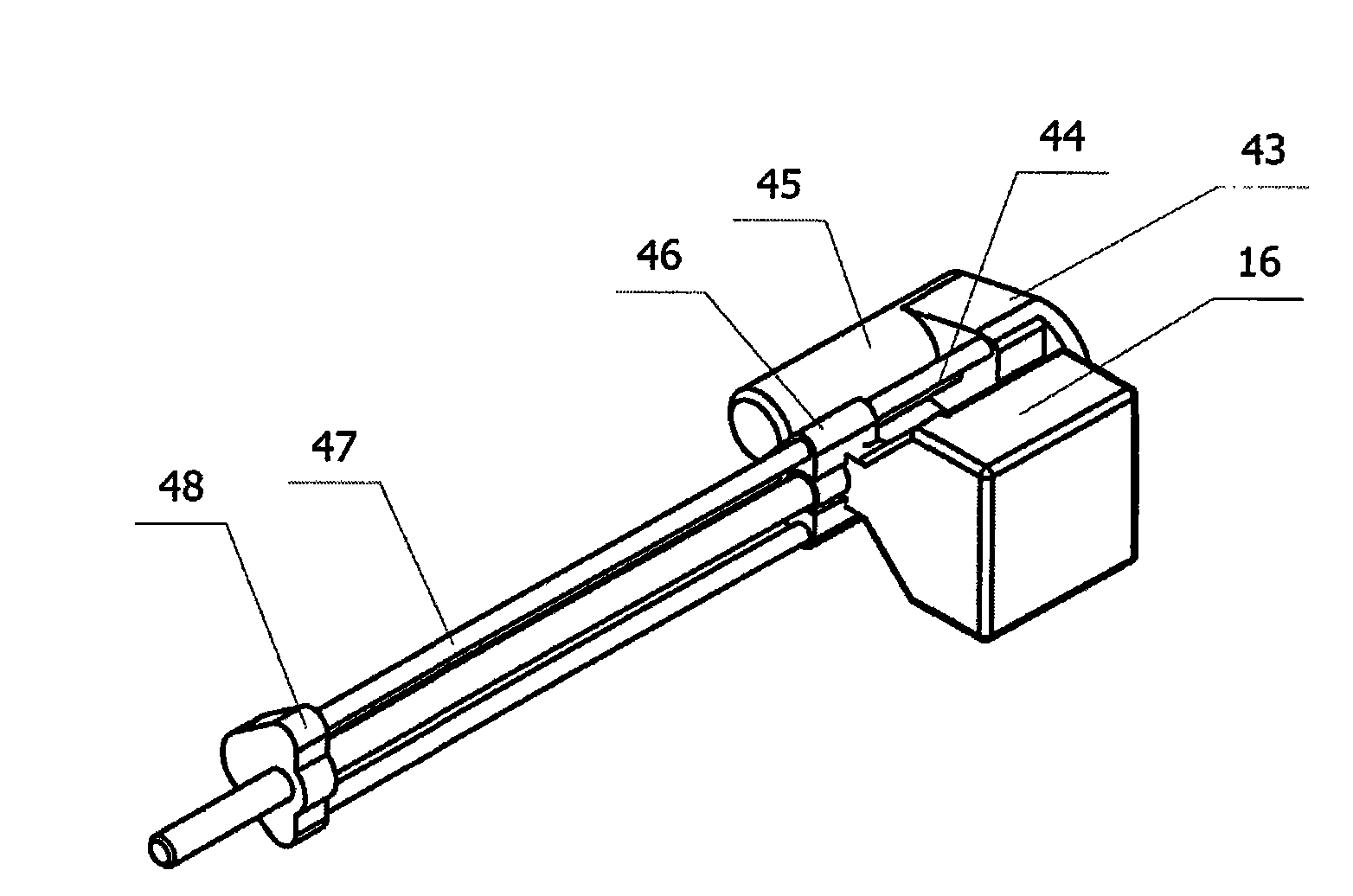
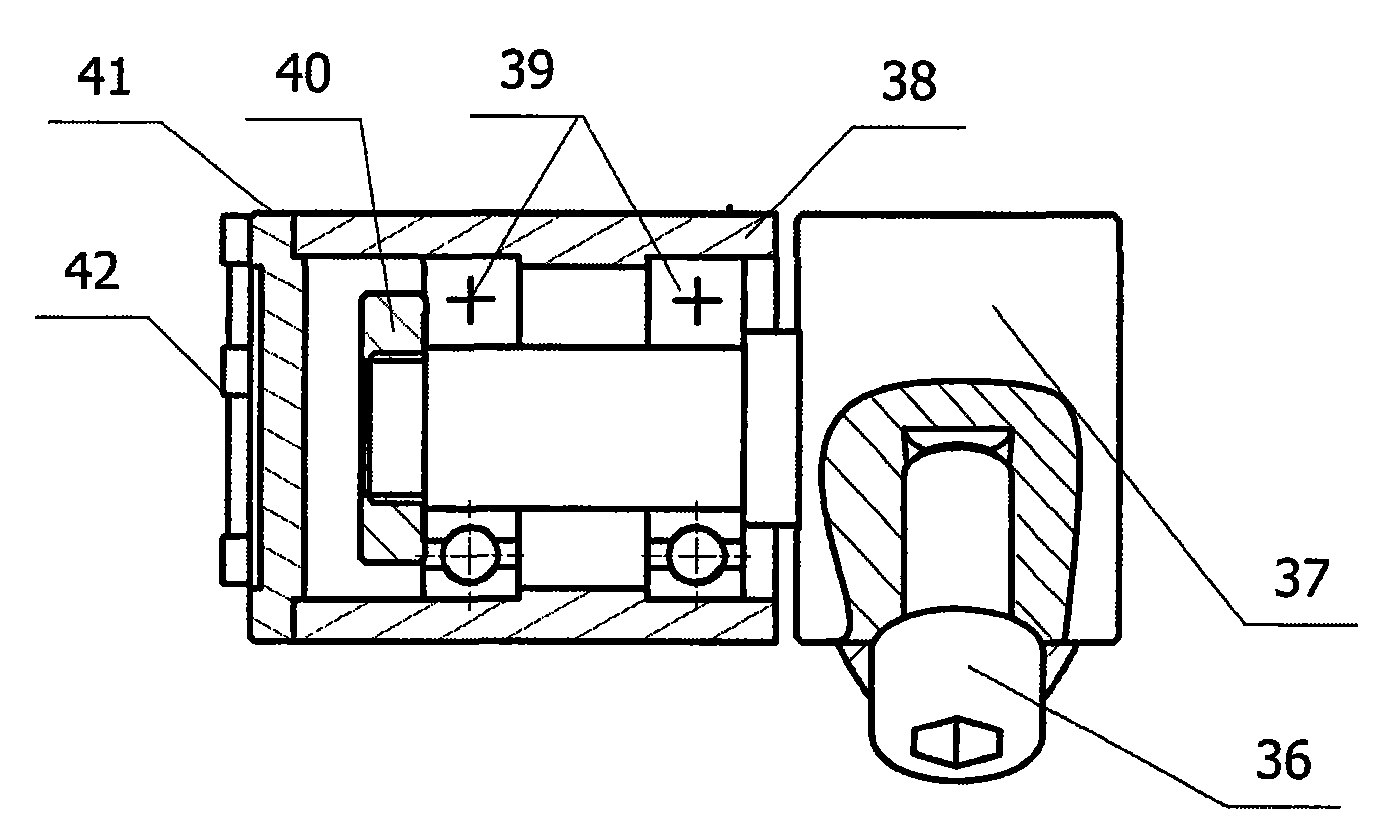
[0027] The structure of the present invention is as figure 1 The shown surgical robot arm is composed of scalpel feed mechanism, wrist joint, parallelogram mechanism, parallelogram revolving joint, forearm one, forearm one revolving joint, big arm, and big arm revolving joint connection. Scalpel feeding mechanism 15 comprises leading screw 43, motor reducer one 44, motor two 45, slide block 46, two circular guide rails 47 and connecting support 48; Wrist joint comprises ball bowl 17, three driving links 18 and wrist Joint driver 19; Parallelogram mechanism comprises rotating shaft cover 38, drive arm 14, parallelogram row connecting rod one 22, parallelogram row connecting rod two 24, connecting rod support 11 and parallelogram rotation joint 12; Forearm one rotation mechanism comprises Forearm one 10 and forearm one rotary joint 8, the big arm rotary mechanism comprises big arm 6 and big arm rotary joint 4, and small arm one 10, big arm 6 are circular hollow pipe fittings; Pa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More