

Connecting rod type under-actuated finger mechanism
An underactuated, link-type technology, applied in the field of anthropomorphic robots, can solve the problems of inferior gripping force of fingers driven by tendons, small gripping force of fingers, limited translation stroke of racks, etc. Large and small effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The specific structure and working principle of the present invention will be further described below in conjunction with the accompanying drawings and embodiments.
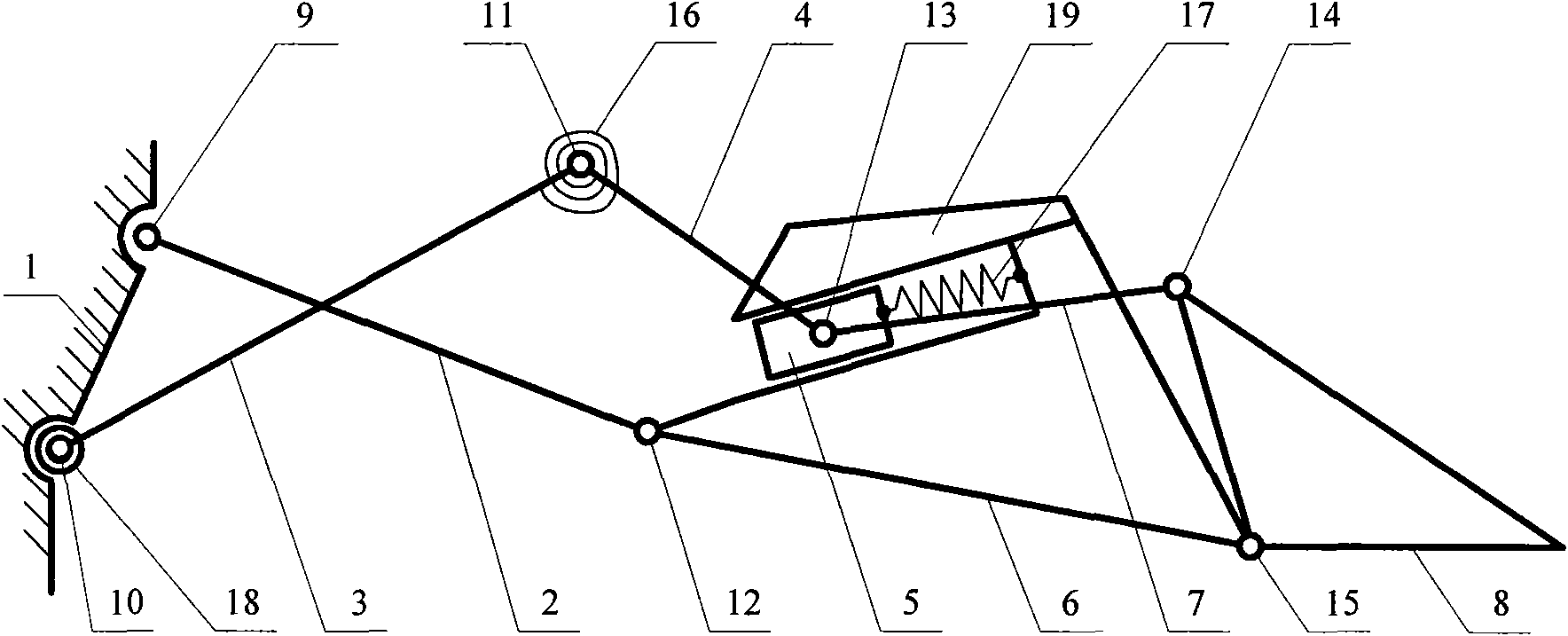
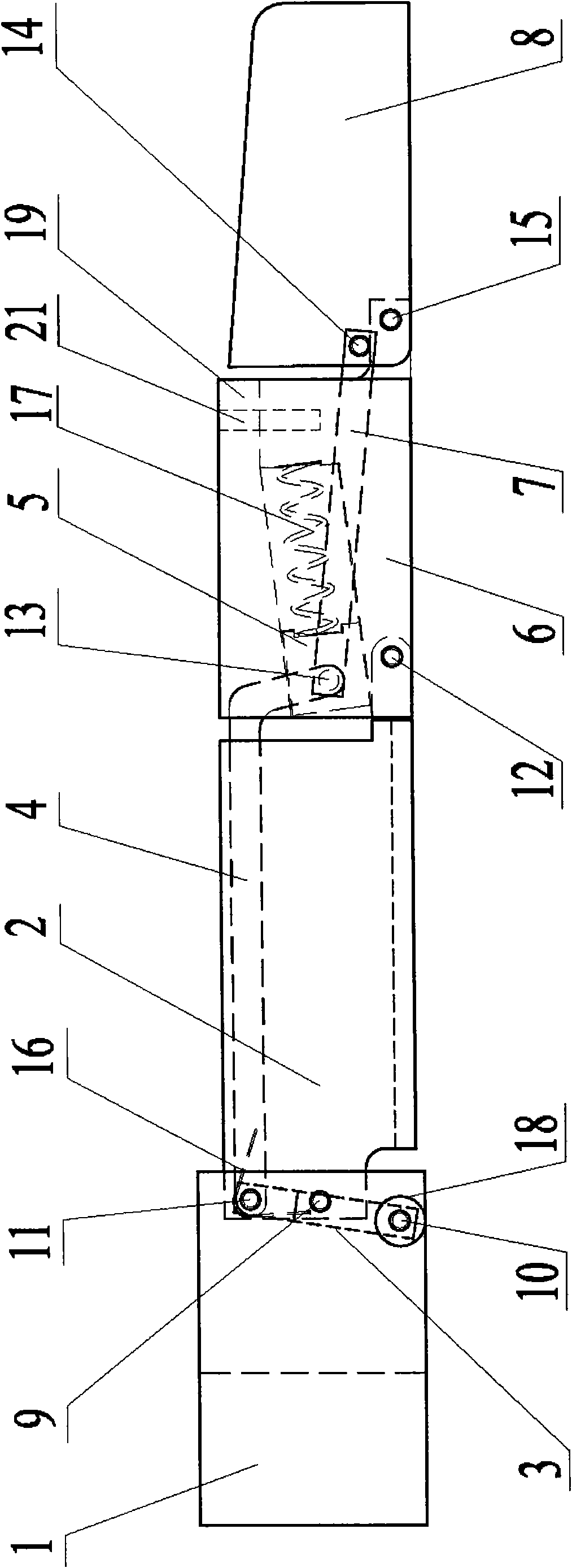
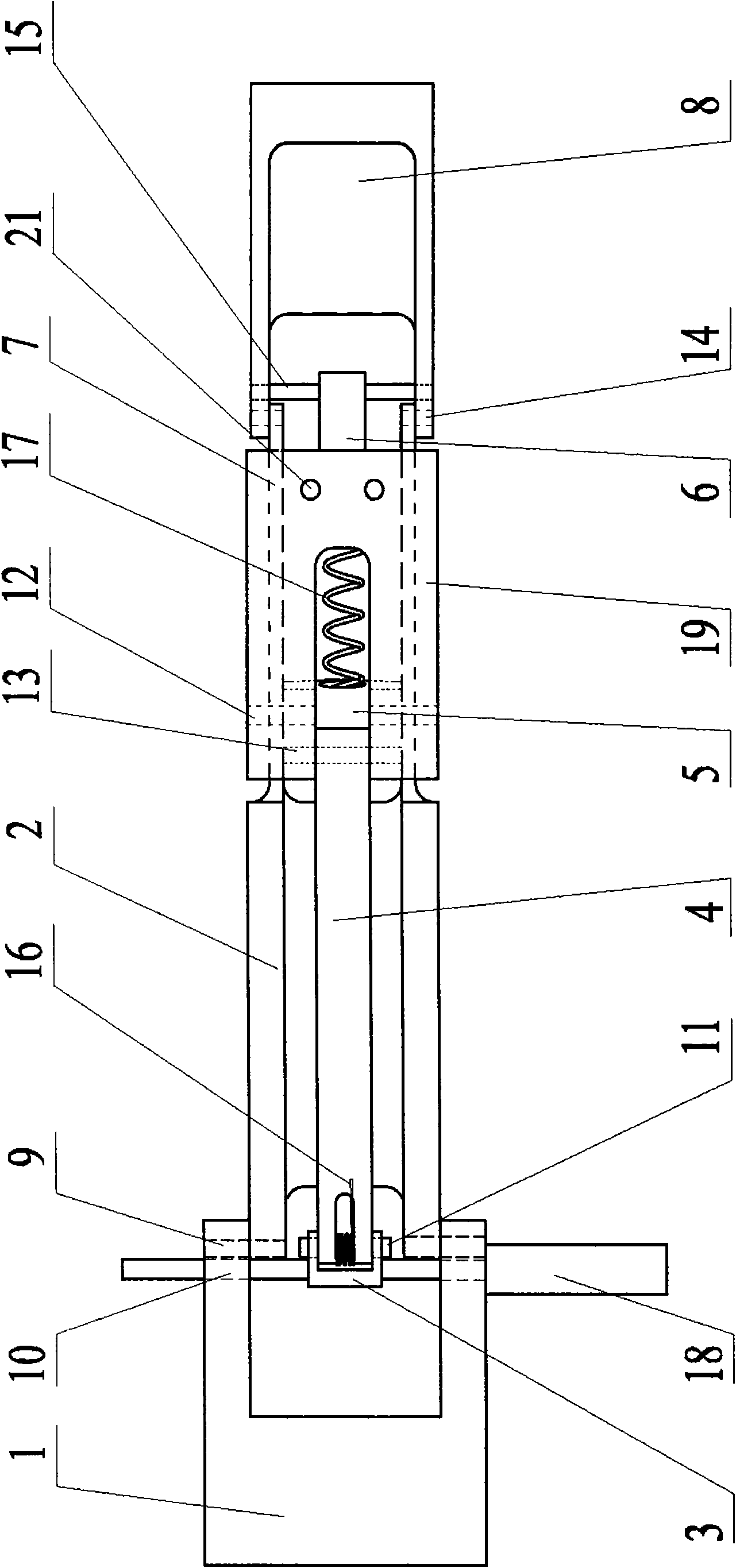
[0039] The 8-link underactuated finger mechanism of the present invention, such as figure 1 As shown, it includes 1 motor and its reducer, 8 connecting rods, 1 guide rail device, 7 rotary joints, 1 torsion spring and 1 wire spring; the first connecting rod is the base, and the said The second connecting rod, the sixth connecting rod and the eighth connecting rod are respectively the first phalanx, the second phalanx and the third phalanx; the guide rail is located inside the second phalanx, and the fifth connecting rod It is a slider installed in the guide rail and can slide in the guide rail; the first joint connects the first connecting rod (base) and the second connecting rod, and the second joint connects the first connecting rod The connecting rod (base) and the third connecting rod, the third joint ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More