

Robust adaptive autopilot control algorithm for navigation simulator
A technology of robust self-adaptation and control algorithm, which is applied in the direction of self-adaptive control, general control system, control/regulation system, etc., can solve problems such as not having robustness and adaptability at the same time, and only having adaptability, etc., to achieve improvement Control effect, speed up convergence time, improve the effect of convergence rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] Below in conjunction with accompanying drawing and embodiment the present invention is described in further detail:
[0031] The invention uses a robust neural network control algorithm, adopts a direct control scheme, and trains the inverse of the controlled object on-line, so that the design of the robust controller becomes simple. On the basis of ensuring the robustness of the system, the neural network is used to deal with the time-varying and nonlinearity of the controlled object; and the most widely used C language in engineering is used to write programs, which has high engineering application value.
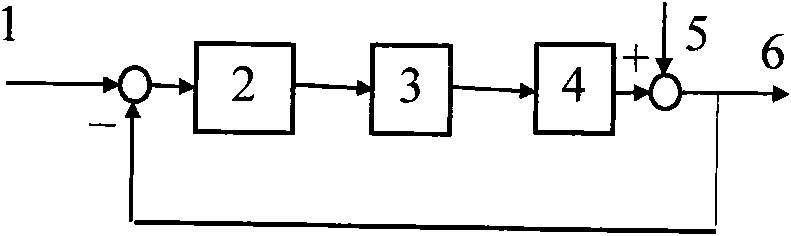
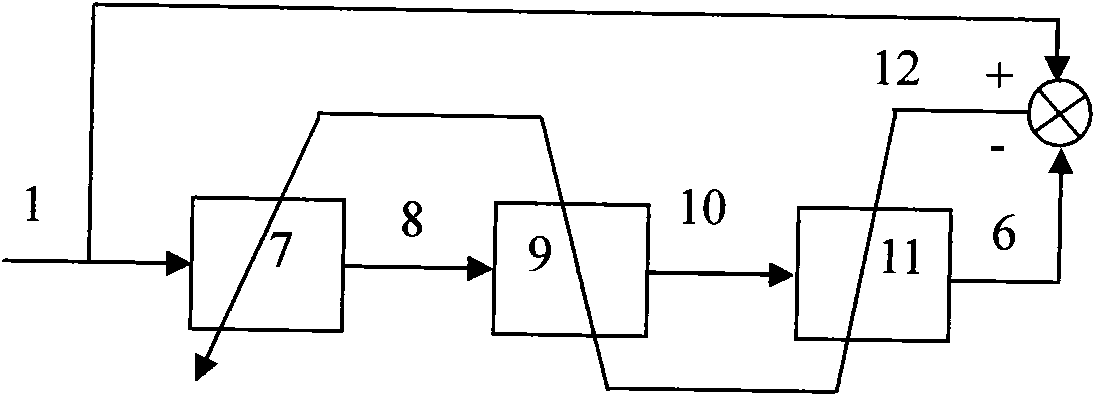
[0032] The overall program block diagram of the system is as follows figure 1 As shown, the specific implementation block diagram of the direct control scheme of course keeping is as follows: figure 2 shown.
[0033] The present invention adopts the structure in which the neural network and the mathematical model of ship motion are connected in series to train t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More