

Multi-joint endoscope bending mechanism with force sensing function
A technology of sensing function and bending mechanism, applied in the field of medical endoscopy, can solve the problems of inability to sense the contact pressure between the mirror body and the intestinal wall, low safety factor, and damage to the intestinal wall, etc., to achieve flexible space composite bending ability, High safety factor and pain relief effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
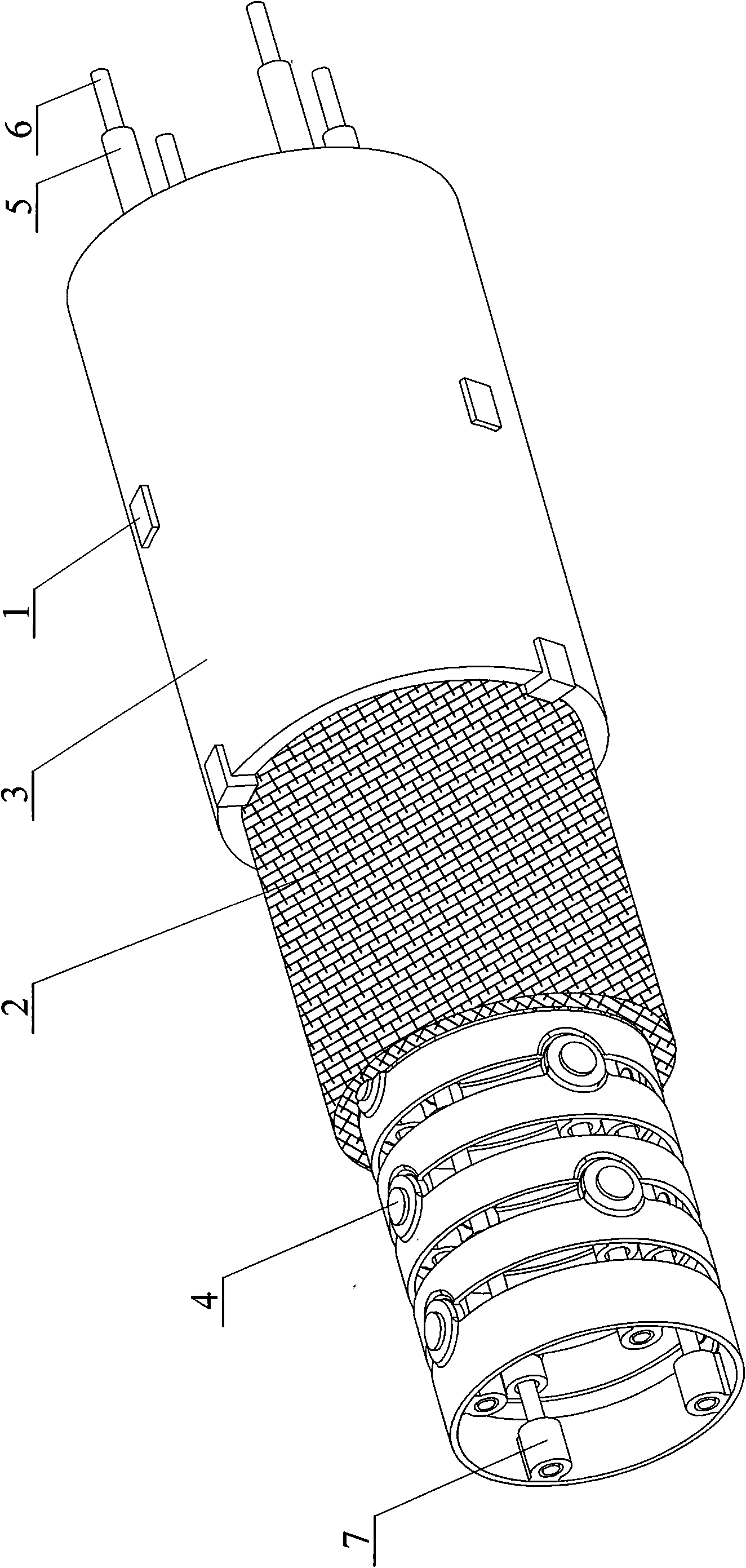
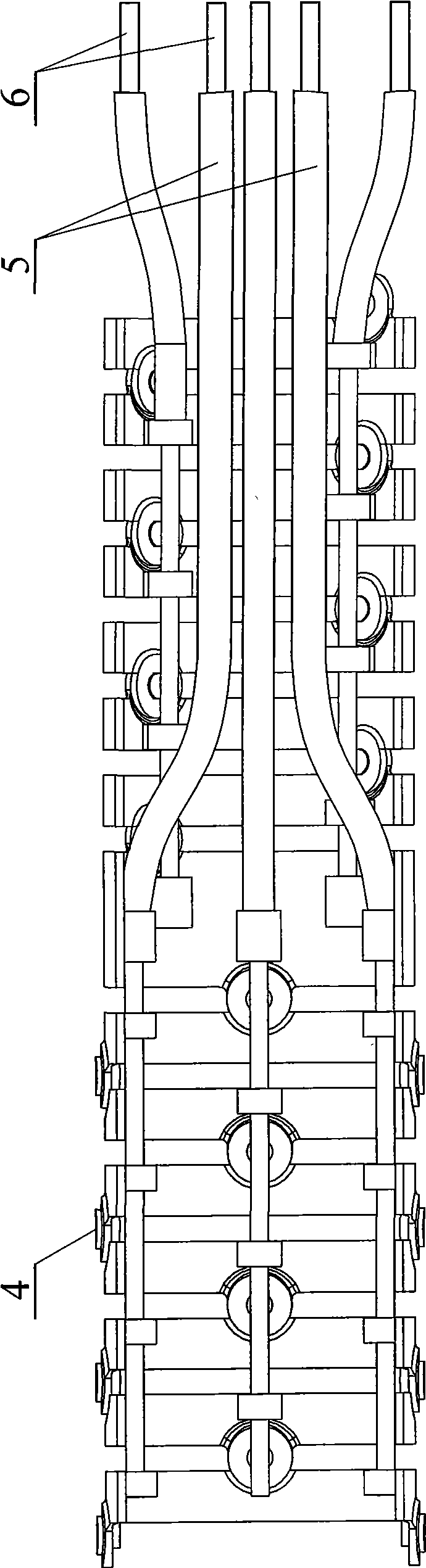
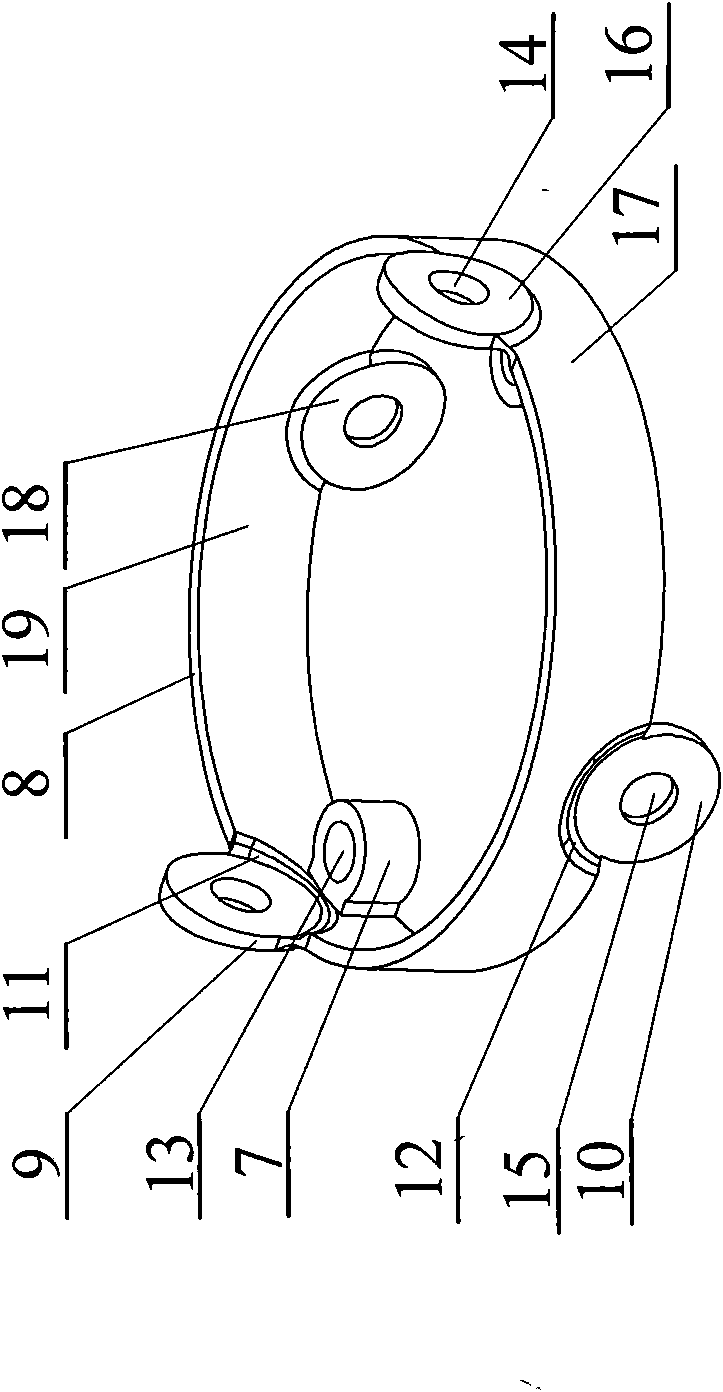
[0008] Specific implementation mode one: combine Figure 1 ~ Figure 3 To illustrate this embodiment, the bending mechanism of this embodiment is composed of five curved single-joint segments, thirty sensors 1, steel wire braided mesh 2 and rubber covering film 3; each curved single-joint segment consists of multiple joint universal rings, A plurality of rivets 4, four spring tubes 5, four multi-strand steel wires 6 and a plurality of guide seats 7; each joint universal ring is formed by stamping stainless steel, and each joint universal ring is composed of a ring 8, two second A connecting ear 9 and two second connecting ears 10 are formed, and two first arc-shaped grooves 11 are opened on one end surface of the ring 8, and the two first arc-shaped grooves 11 are opposite to The central axis of the ring 8 is arranged symmetrically, and the other side end surface of the ring 8 is provided with two second arc-shaped grooves 12, and the two second arc-shaped grooves 12 are opposi...
specific Embodiment approach 2
[0009] Embodiment 2: The length of each curved single-joint segment in this embodiment is 120 mm. Such arrangement has better bending flexibility. Others are the same as in the first embodiment.
specific Embodiment approach 3
[0010] Specific implementation mode three: combination image 3 To describe this embodiment, the center-to-center distance between the first riveting hole 13 of the first connecting ear 9 and the second riveting hole 15 of the second connecting ear 10 on each joint universal ring of this embodiment is 4.5 mm. Such setting is convenient for installation and has better bending flexibility. Others are the same as in the first or second embodiment.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More