

System and method for vehicle navigation and piloting including absolute and relative coordinates
A technology of relative coordinates and vehicle navigation, applied to directions such as direction finders using radio waves, capable of solving problems such as undiscovered solutions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
example 1
[0055] Example 1: Vehicles within direct sensor range of each other
[0056] In this example, sensors within each vehicle can identify other vehicles and can estimate their range and orientation. A navigation or collision avoidance system can determine if it is being switched off in such a way that there is a possibility of a collision. In this example, it should be expected that the vehicles will soon avoid each other), but a digital map is not really needed. In this direct sensor case, the vehicle sensors themselves use relative measurements to make these observations. This also applies to the sensing of stationary objects. Also, a digital map is not required to sense stationary objects, but map matching to objects in the map can be useful both to identify objects related to road geometry and also to obtain additional information about said objects.
[0057] Depending on the accuracy of the sensors, road signs, for example, can be easily identified and their relative pos...
example 2
[0058] Example 2: Vehicles within sensor range of the same object
[0059] In this example, the sensors on each vehicle may not have sufficient range or sensitivity to directly detect the other vehicle. There may be obstacles that block direct sensor detection, such as hills. However, each sensor in the vehicle can detect common objects such as figure 1 Sign A in. As shown in the examples described above, each vehicle can be matched to marker A using "object-based map matching" using today's nominal accuracy of absolute position determination on the vehicle and within the map. Unlike the typical "map matching" feature mentioned above that matches the vehicle's estimated position to road centerlines contained in a map as part of today's navigation systems, according to embodiments of the present invention, object-based map matching The estimated location and properties of the physical objects sensed by the vehicle are compared to one or more physical objects and their prope...
example 3
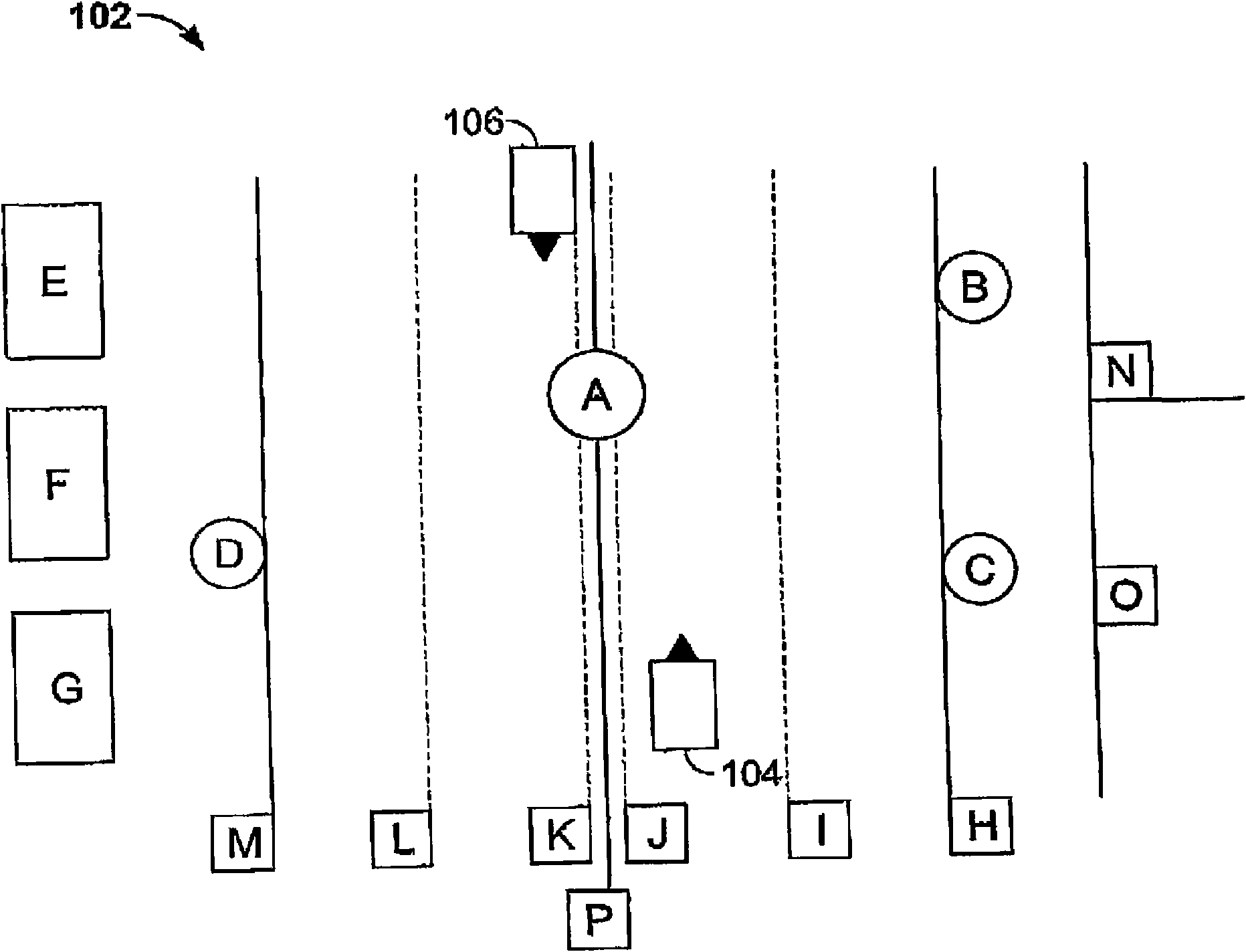
[0062] Example 3: Vehicles beyond the sensor range of the same object
[0063] In the most general case, sensors on two vehicles may not be able to detect other vehicles or shared objects, but may still be able to detect objects in their immediate vicinity. For example, there may not be figure 1 A suitable object that happens to be between two vehicles and is visible to both vehicles, like the sign A in . Instead, vehicle 104 may only be able to detect markers B and C; and vehicle 106 may only be able to detect marker D. FIG. Even so, vehicle 104 can obtain a very accurate relative position and heading from objects B and C based on its relative sensor measurements. Similarly, vehicle 106 can obtain a very accurate relative position and heading from its measurements of object D and its heading estimate. Since B and C and D each have exact relative positions relative to each other as stored in the map database, these exact relative positions can then be used by the vehicle t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More