

Invariance identification method based on characteristic point and homography matching
A recognition method and a homography technology, applied in the fields of image understanding, computer vision, and pattern recognition, to achieve rapid and accurate object recognition, reduce computing resource consumption, and improve computing efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0070] The present invention will be further described in conjunction with the accompanying drawings and embodiments. Now take the model shown in FIG. 1 as an example to specifically describe the invariance identification method of the present invention.
[0071] 1. Implementation of 3D model definition
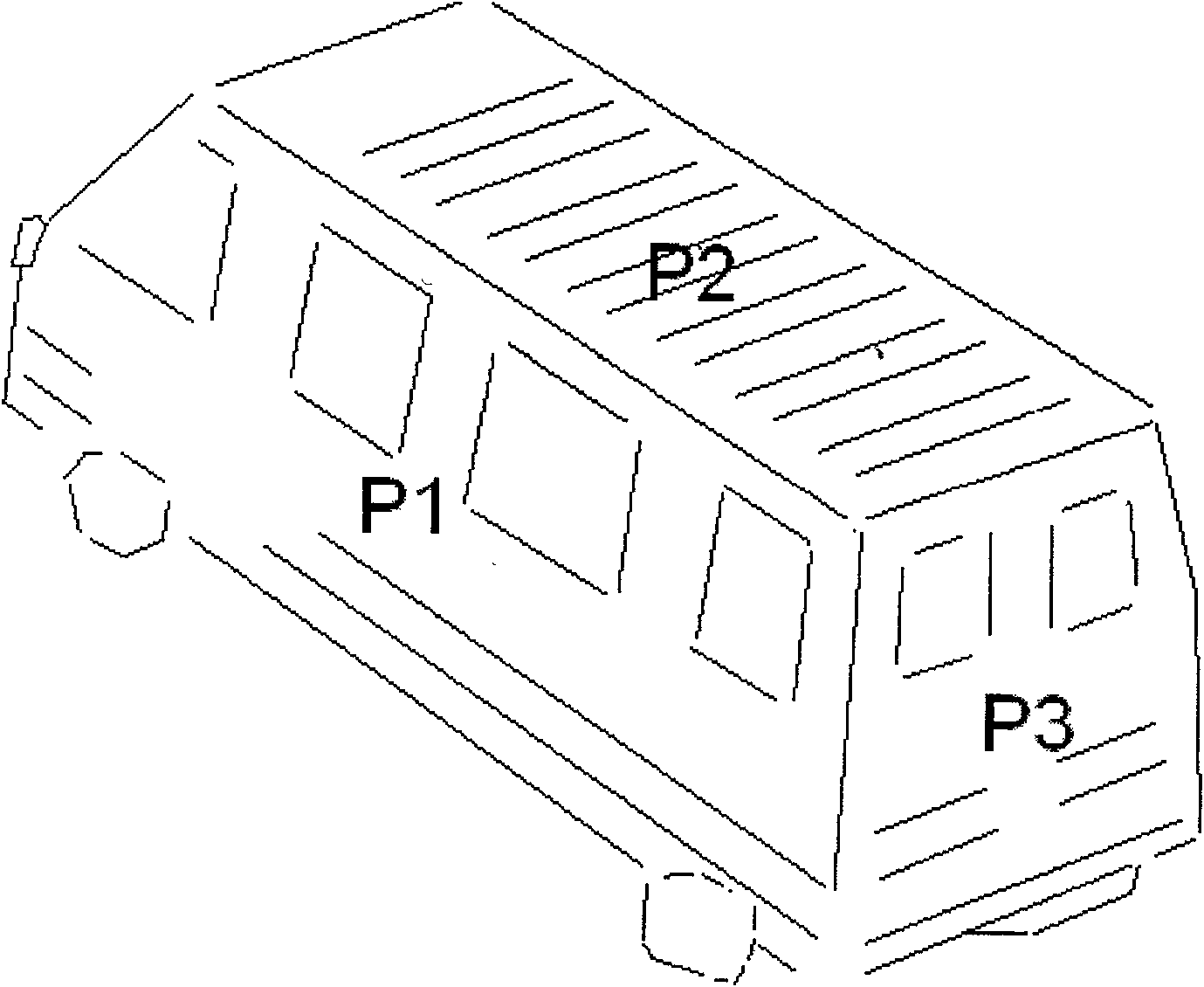
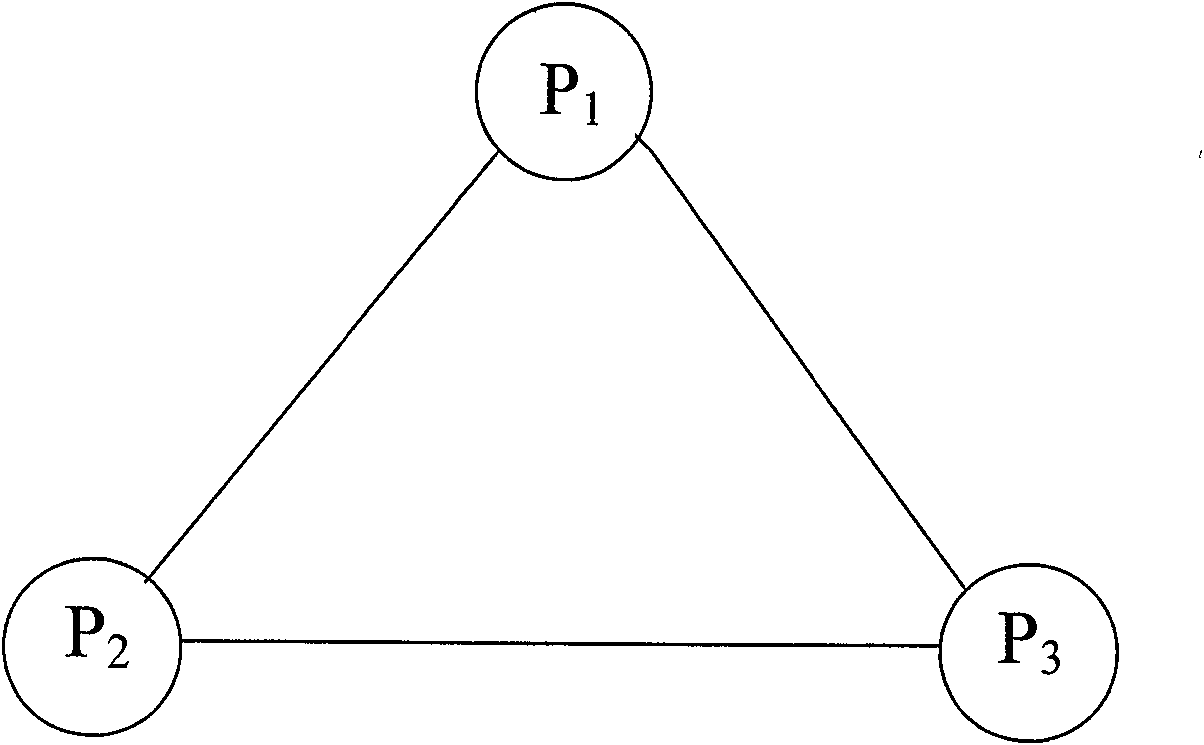
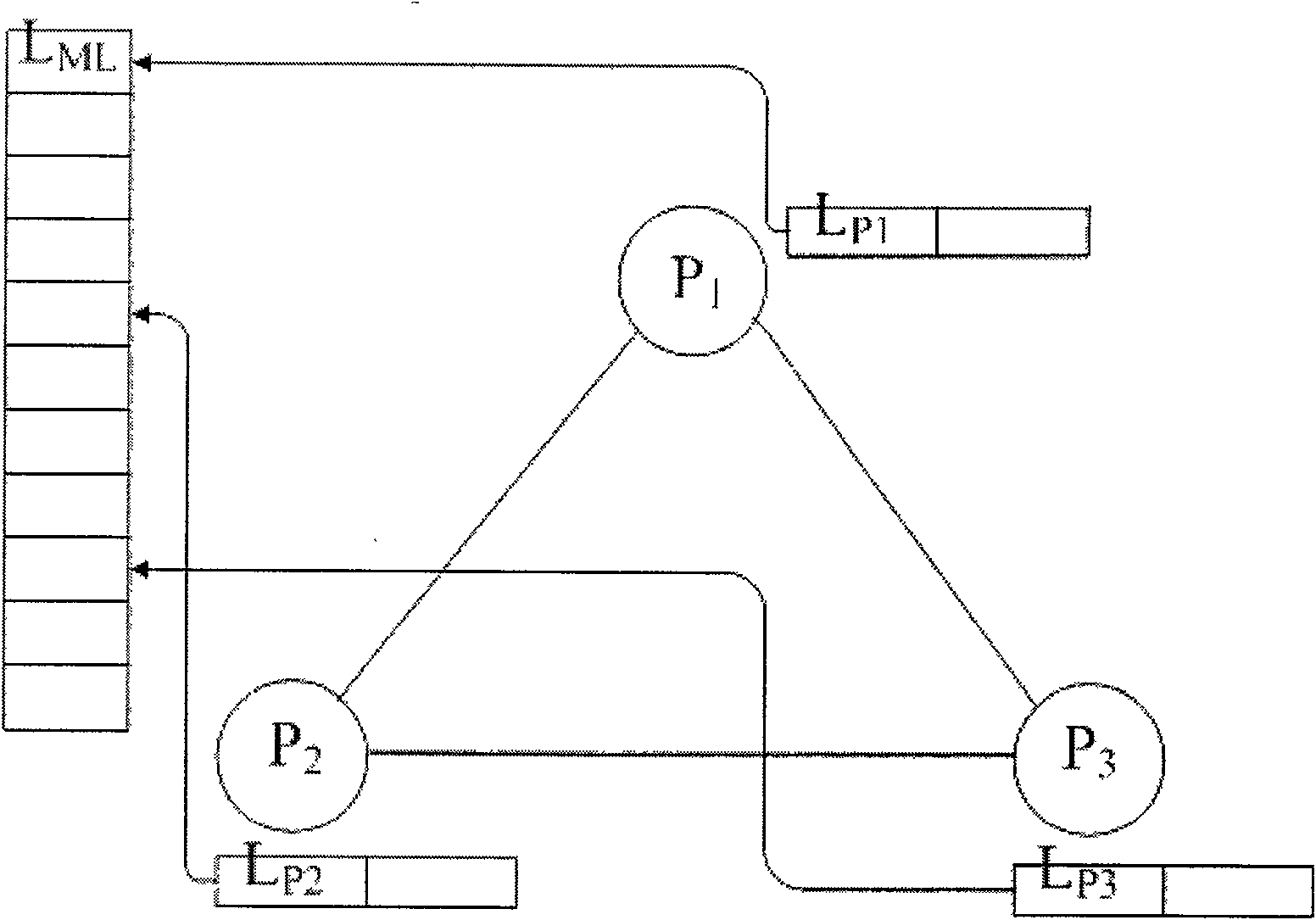
[0072] An image (a) of a car model with three visible faces can be described as a (b) structure, as shown in Figure 1. For the long contour line set L in the model image ML For each straight line segment in , we need to indicate the plane where it is located. Let each plane P k Both maintain a straight line group L Pk , while L Pk Each element in is pointing to L ML A straight line segment in , means that the straight line belongs to this plane, as shown in (c) of Figure 1.
[0073] Suppose there are K planes in total, and there are L ML =L P1 ∪L P2 ∪…∪L PK . L ML Some straight line segments in may have multiple pointers at the same time, because it may be the in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More