Target tracking method based on radar/infrared measurement data coordinate conversion
A technology for target tracking and data measurement, which is applied in measuring devices, radio wave measurement systems, radio wave reflection/reradiation, etc., and can solve problems such as reducing tracking accuracy, filter divergence, and model linearization errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] The application method of the present invention will be further described below in conjunction with the accompanying drawings and embodiments.
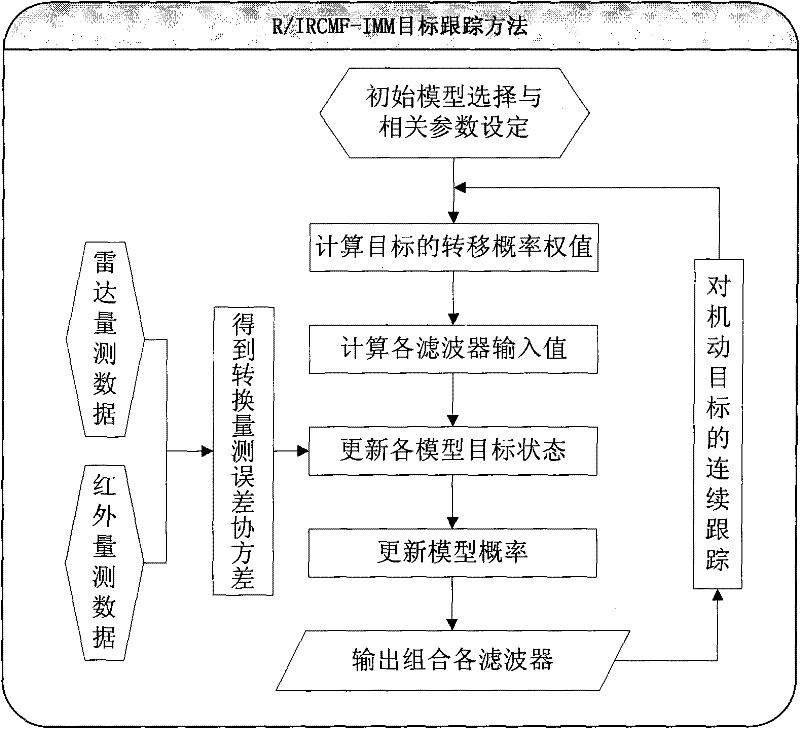
[0054] Based on the invention, a simulation prototype system is developed, which includes five functional modules: human-computer interaction interface module, radar infrared data interface module, data measurement conversion module, interactive multi-mode target tracking module, and target state estimation output module.
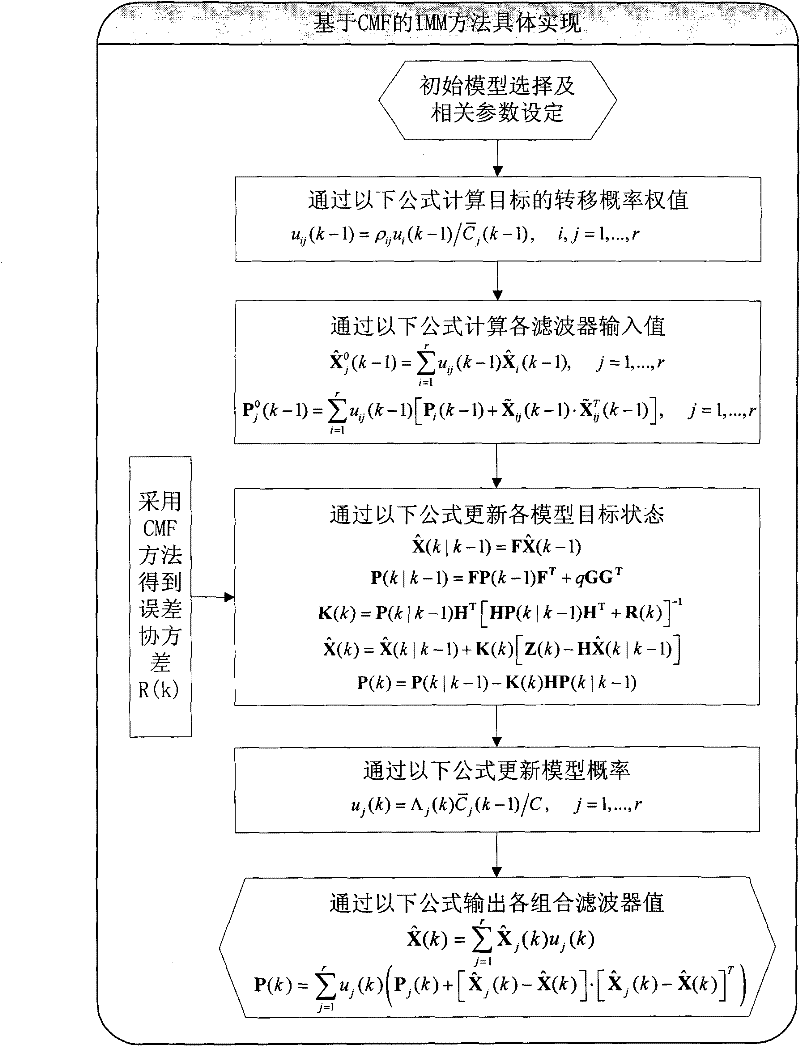
[0055] First, multiple models are selected and related parameters are set through the human-computer interaction interface module. In this embodiment, the following two target motion models (r=2) are selected: (1) uniform motion model, the target state includes 3 coordinates The position and velocity of the tie. State transition matrix F, noise gain matrix G and measurement matrix H are defined as:
[0056] F 1 = 1 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com