

Method for calibrating zeroing of servo mechanism
A zero-correction and servo-machine technology, applied in the field of servo machines, can solve the problems of increasing the number of components, difficult assembly of the servo machine 1, and increasing manufacturing costs, and achieves the effect of simplifying the structure.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
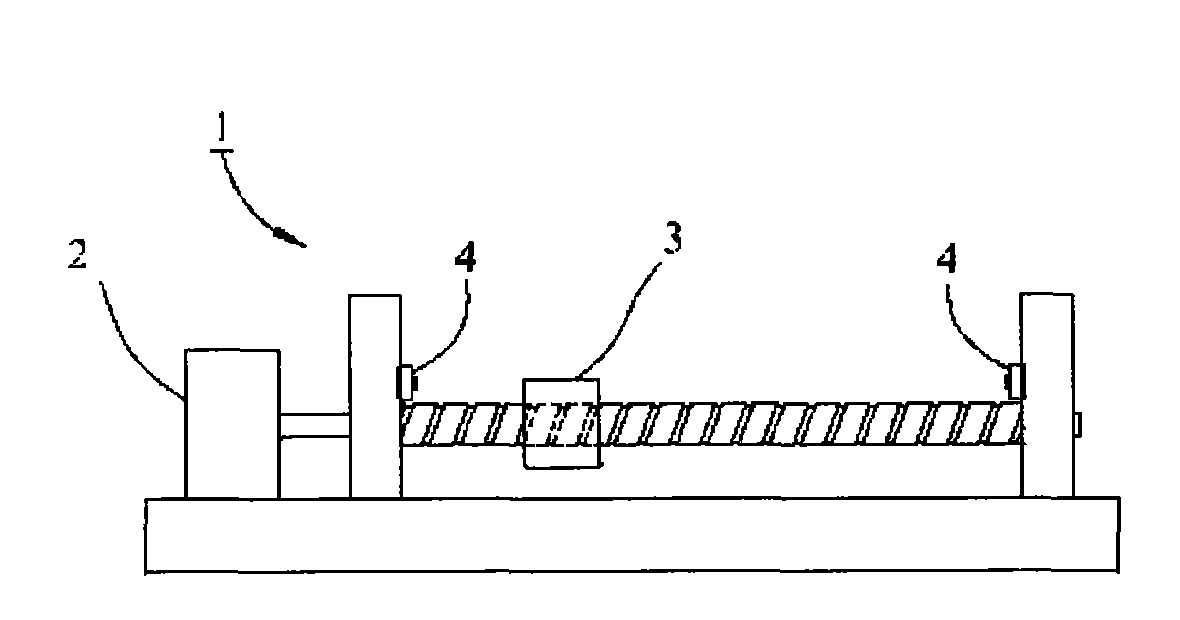
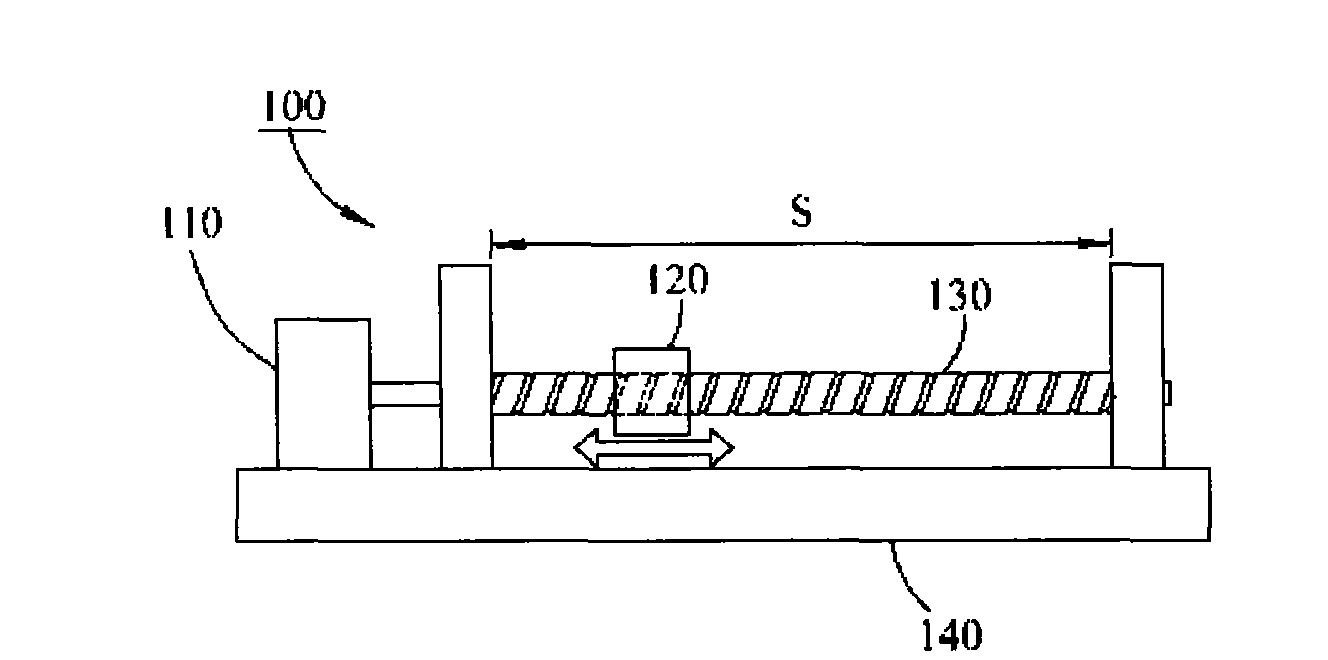
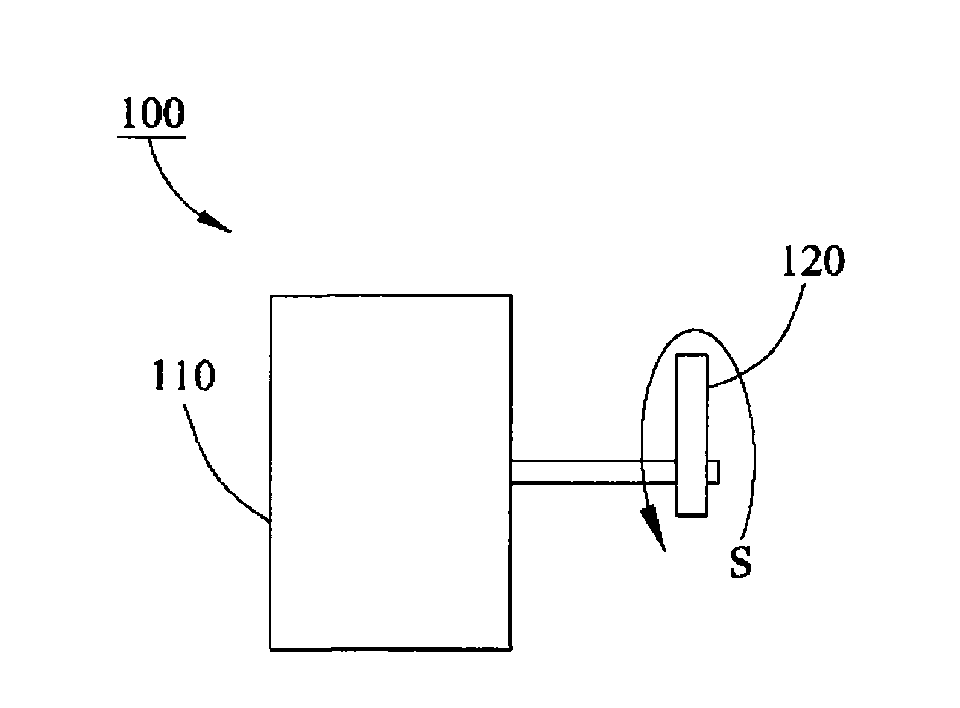
[0046] see figure 2 and image 3 As shown, it is a zero-return calibration method of the servo machine disclosed in the embodiment of the present invention, which is used to obtain the relationship between the movement amount of the servo motor 110 and the movement amount of the moving part 120 to achieve the calibration operation of the servo machine 100 .
[0047] refer to figure 2 and image 3 As shown, it is a schematic diagram of two different forms of the servo machine 100 . Each servo machine 100 includes a servo motor 110 and a moving part 120 . The servo motor 110 is used to drive the moving part 120 to move along the moving path S. As shown in FIG. The motion path S can be a linear path or a rotational angle. When the motion path S is a linear path, the output shaft of the servo motor 110 is connected to the moving part 120 with a transmission device 130 such as a screw or a belt, and the rotational output of the servo motor 110 is converted into a linear outp...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More