

Motion distorting compensation method of mechanical scanning type imaging sonar
A technology of mechanical scanning and distortion compensation, which is applied in the directions of re-radiation of sound waves, utilization of re-radiation, and measuring devices, etc., which can solve problems such as large accumulation of robot positioning errors, rare images, and weakened AUV navigation and positioning capabilities.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
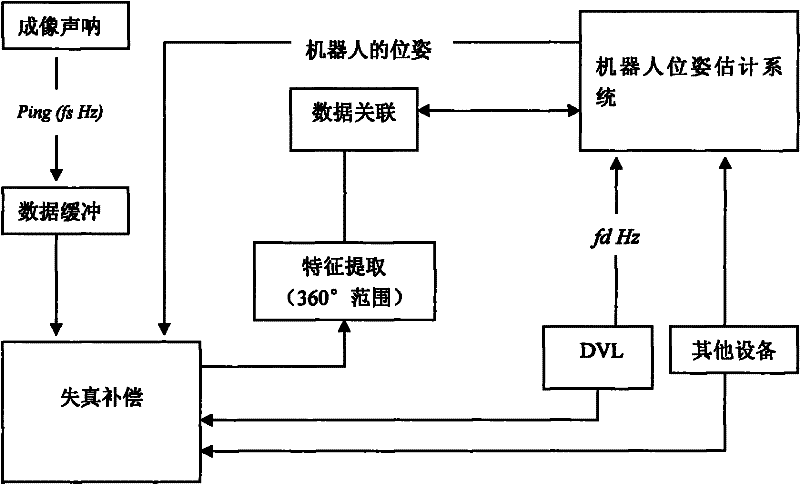
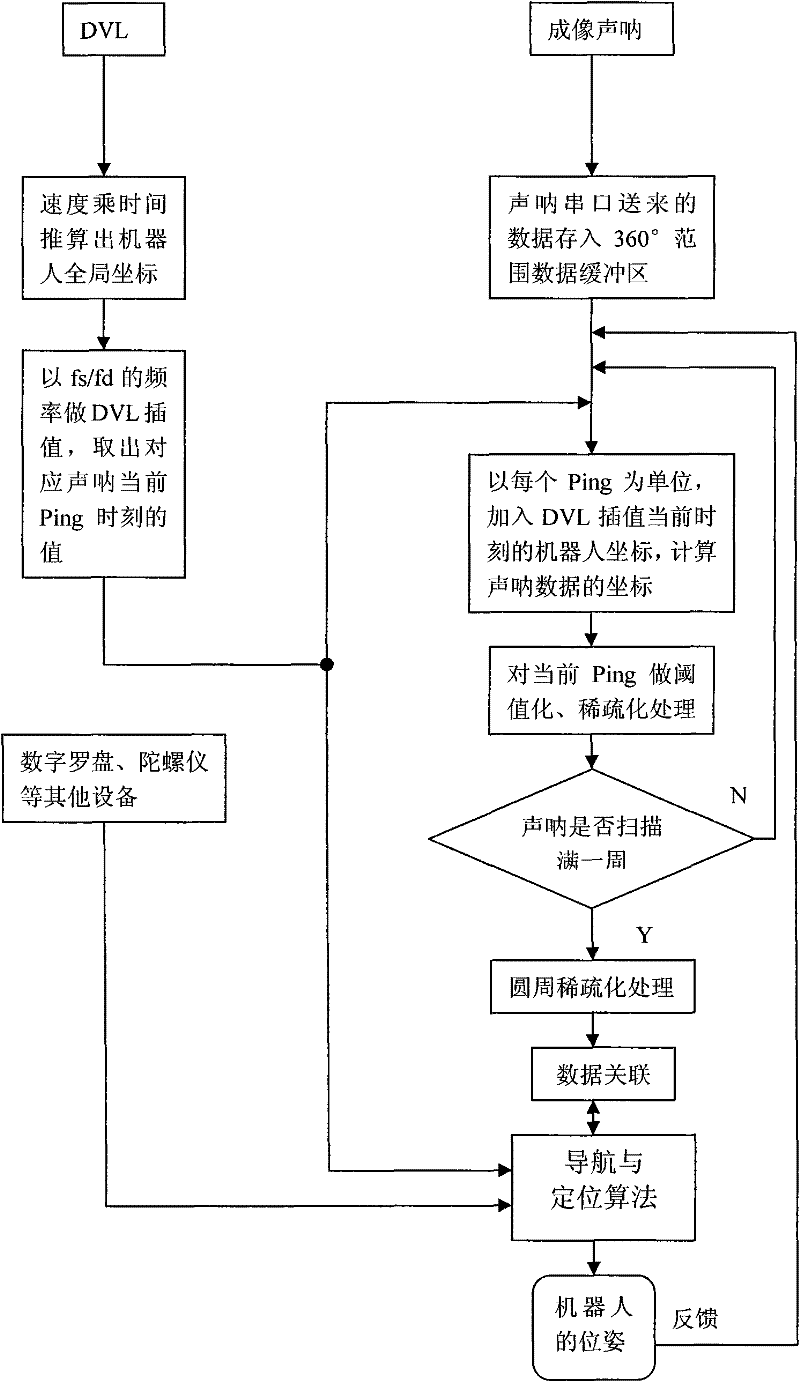
[0022] In the present invention, the autonomous navigation method described above takes SLAM as an example, and its execution process can be roughly divided into three stages: prediction, observation and update. First, the robot pose and point features are stored in an independent state vector, and then the system state is estimated through an iterative recursive process of first prediction and then observation, so as to realize the positioning of the robot and the creation of a feature map. In the prediction stage, the dead reckoning method in the usual sense is actually implemented, which causes a large error in the state estimation of the robot; the feature value is obtained in the observation stage, and if the feature is observed for the first time, it is added to the state vector; if the feature already stored in the state vector, update the values of features already in the AUV and map. The motion distortion compensation method that the present invention adopts is afte...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More