

High-precision moment output control method for control moment gyro group
A technology for controlling moment gyroscopes and output control, applied in adaptive control, general control systems, non-electric variable control, etc., can solve the problem of singularity of control moment gyroscope groups, cannot meet the high-accuracy requirements of high-agility satellite attitude control, Problems such as unable to output torque
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
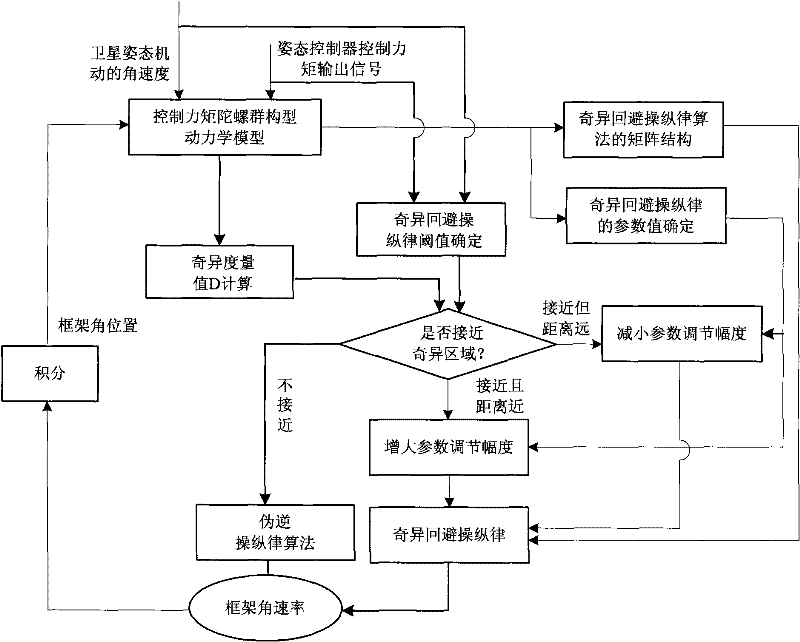
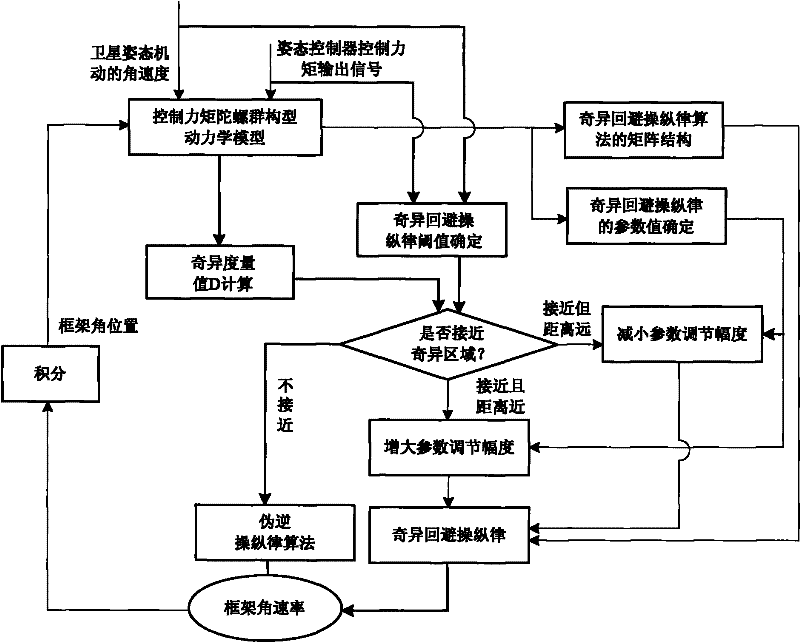
[0031] like figure 1 and figure 2 As shown, a high-precision torque output control method for controlling a torque gyro group, the steps are as follows:
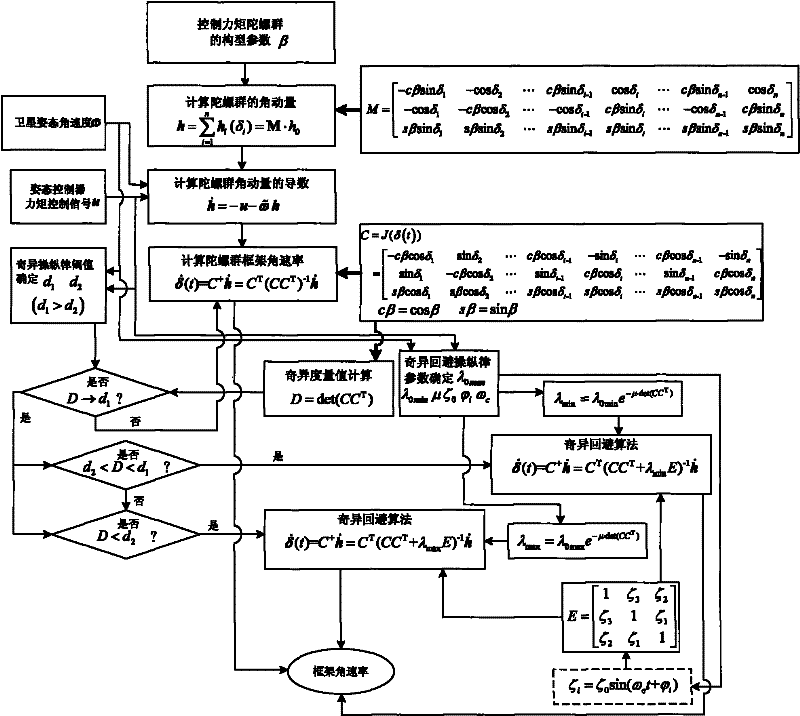
[0032] (1) First, establish the dynamic model of the control torque gyroscope group according to the configuration of the control torque gyroscope group, and calculate the angular momentum of the entire control torque gyroscope group from the angular position of the frame;
[0033] Control the angular momentum of the moment gyroscope group: h = Σ i = 1 n h i ( δ i ) = M · h 0 , in, M = - cβ sin δ ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More