

Rotary inertia identification method for permanent magnet synchronous motor AC servo system
A technology of permanent magnet synchronous motor and moment of inertia, which is applied in the field of moment of inertia identification, can solve the problems that the identification result deviates from the real result, errors, and cannot identify the change of moment of inertia, etc., and achieves the effect of high identification accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] A preferred embodiment will be given below, and the present invention will be described more clearly and completely in conjunction with the accompanying drawings.
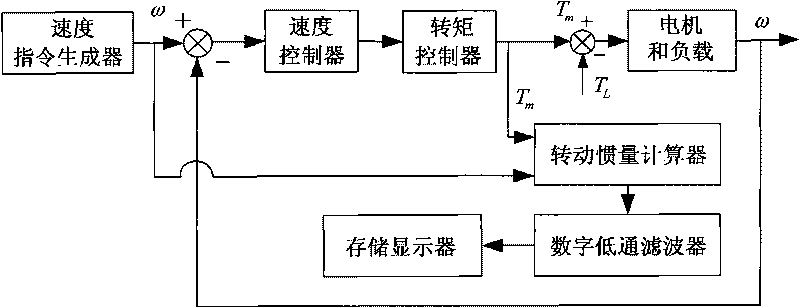
[0031] Such as figure 1 As shown, the moment of inertia identifier of the AC permanent magnet synchronous motor servo system adopted by the inventive method comprises the following seven parts: speed command generator, speed controller, torque controller, moment of inertia calculator, digital low-pass filter , storage display, motor and load. The torque loop is the inner loop of the speed loop. One output of the speed command generator is used as the input of the speed controller, and the other output is used as the input of the moment of inertia calculator. The output of the speed controller is used as the input of the torque controller. The output of the controller is used as the input of the motor and the load. The electromagnetic torque overcomes the load torque to make the motor drive the load to rotat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More