Amphibious bionic variable magnetism sucker
A magnetic chuck, bionic technology, applied in the directions of manipulators, chucks, manufacturing tools, etc., can solve the problems of not being able to work underwater, unsuitable for moving robot walking devices on underwater walls, and large in size.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
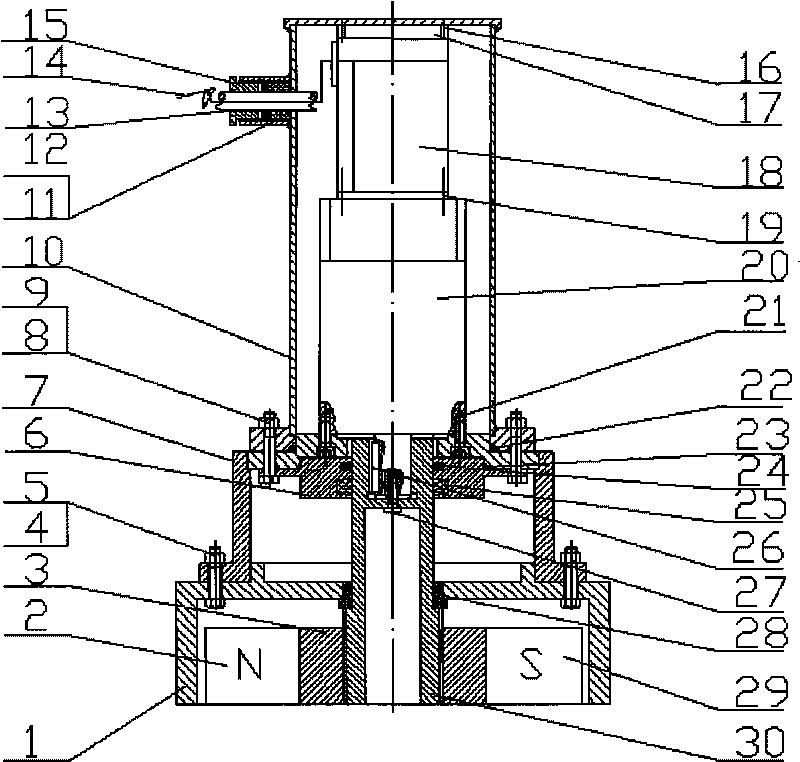
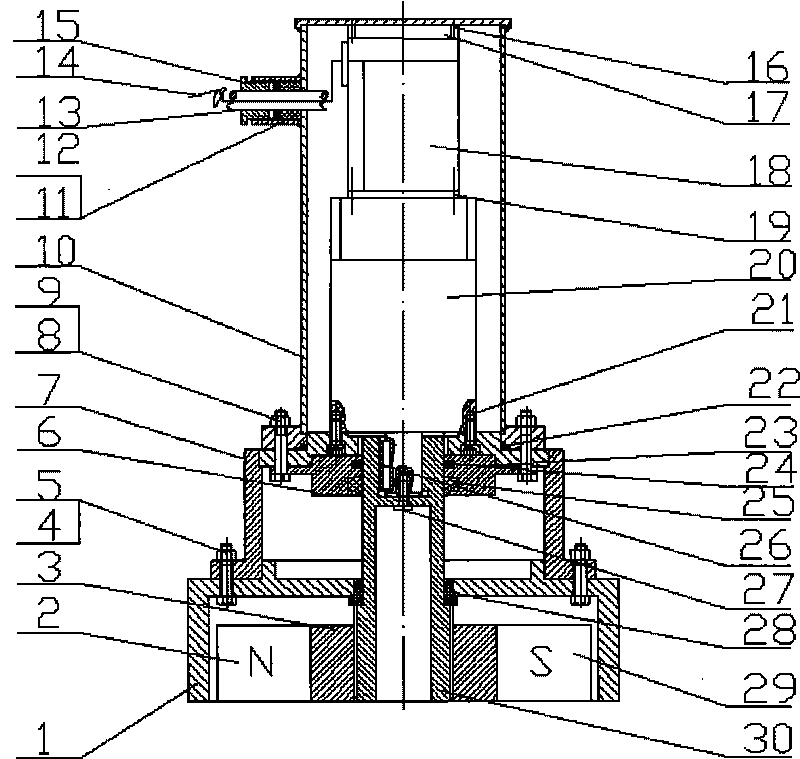
[0017] like figure 1 As shown, an amphibious biomimetic variable magnetic suction cup used for water and underwater wall walking robots, its composition and connection relationship are as follows.
[0018] The present invention comprises the driving system that is made of drive system sealed box 10, the servomotor 18 that is arranged in the drive system sealed box 10, the speed reducer 20 that is connected with servomotor 18, the magnetic adsorption system that is arranged at the bottom of the drive system, is arranged on The static sealing system and the dynamic sealing system between the driving system and the magnetic adsorption system are characterized in that: the output shaft of the reducer 20 is connected with the screw bushing 30 through the set screw 27, and the screw bushing 30 is fitted There is a dynamic sealing cover 6, and the gray ring 24 and felt 25 are sandwiched between the dynamic sealing cover 6 and the screw shaft sleeve 30 to form a dynamic sealing system...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com