

Drawing wire type serial mechanical arm
A manipulator and wire-pulling technology, which is applied in the field of serial manipulator structures, can solve the problems of large and complex parallel manipulator structures, reduce costs and energy consumption, and is not suitable for miniaturization, so as to overcome the bearing capacity and flexibility of movement and reduce the number of additional devices. , Overcome the effect of small workspace
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
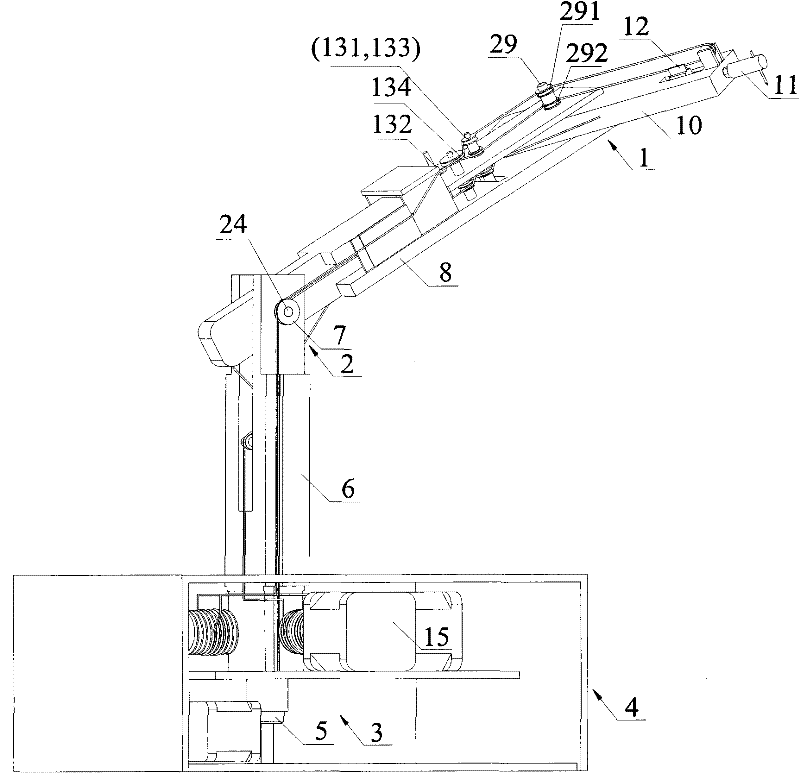
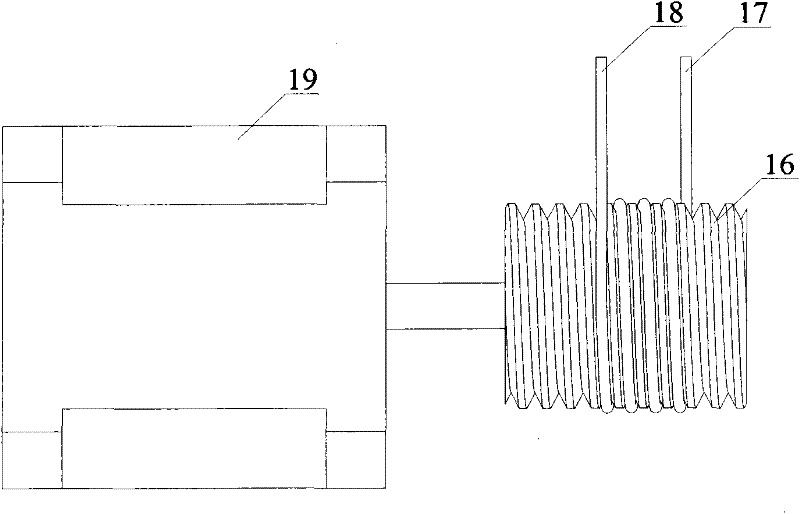
[0024] In this embodiment, the design of the drive box of the manipulator base: the motor winding mechanism is installed in the drive box of the manipulator base, and the winding mechanism is a spiral cylinder with a thread groove, which is directly installed on the rotating shaft of the motor, and is used for pulling and manipulating the pull wire. Movement; the rotation of the helical cylinder winding mechanism can make one end of the control cable wound in the spiral groove stretch, while the other end shortens, and the elongation and shortening of the two control lines are the same, so as to ensure that the control line maintains Tensioned state.
[0025] The design of each joint: including the wrist joint with 2 degrees of freedom, the elbow joint with 1 degree of freedom and the shoulder joint with 2 degrees of freedom.
[0026] The wrist joint includes a wrist joint shaft, a wrist joint rod and a wrist joint axial rotation mechanism. The wrist joint rod is connected wi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More