

Monocular vision vehicle distance measuring method based on road and vehicle information
A self-information, monocular vision technology, applied in the direction of sight distance measurement, distance measurement, measurement device, etc., can solve the problems of inability to take a full picture of the vehicle, high computational complexity, large ranging error, etc., to achieve easy large-scale promotion, The effect of simple system configuration and low hardware cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
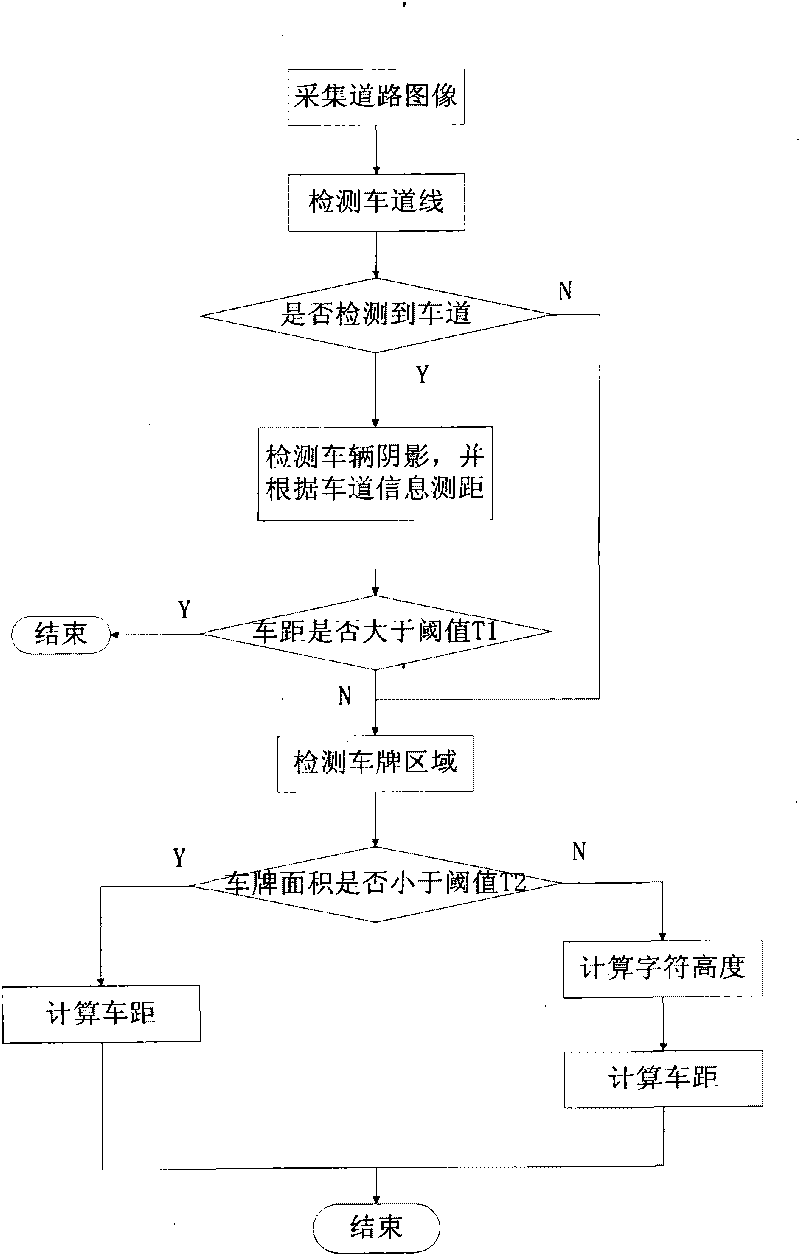
[0021] The monocular vision distance measurement method based on road and vehicle self-information of the present invention is divided into three situations:
[0022] (1) Use the lane width of the car in the image to measure the distance between vehicles at a long distance.
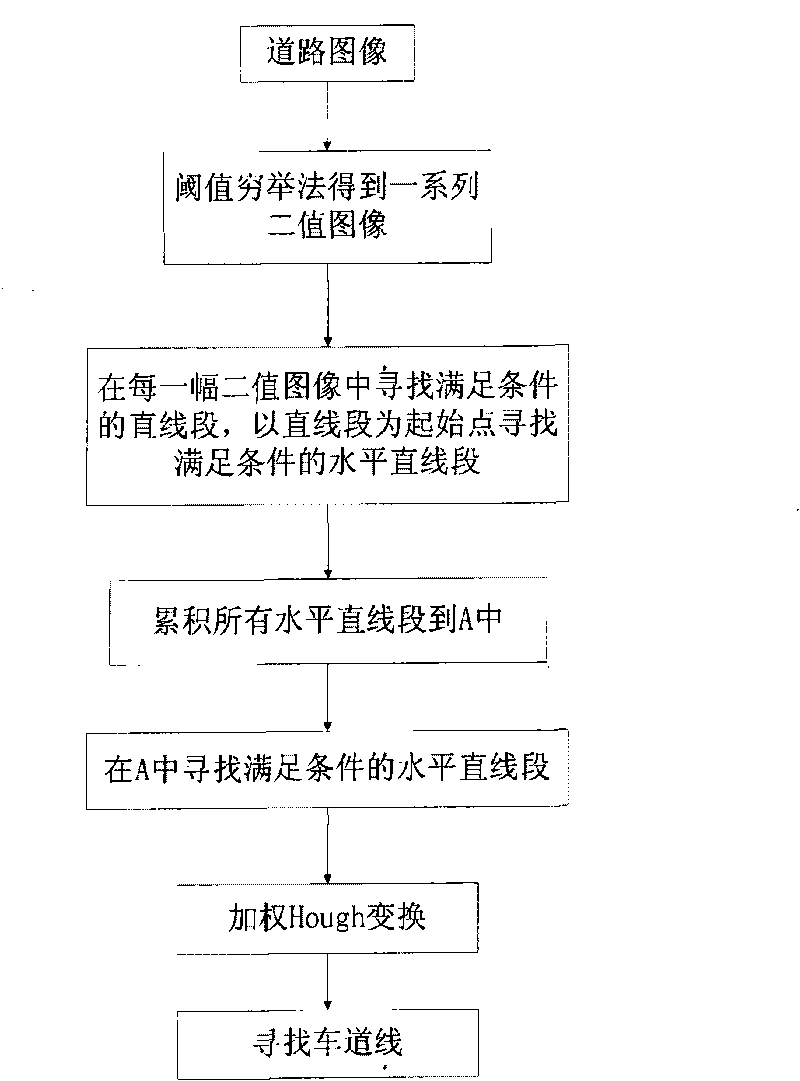
[0023] In order to ensure the safe, orderly and smooth driving of vehicles, traffic sign lines are drawn on expressways and urban roads in our country, the most important of which is the lane dividing line. There are lane dividing lines or road edge lines on the road almost every day. , these marking lines can also be used as a yardstick for distance measurement while playing a role in guiding traffic. Due to the imaging principle of the camera, in the road image captured by the camera installed on the driving car, the parallel lane lines on the road will become cross lines in the image. Large, the width of the lane in the distance is small, that is to say, there is a certain relationship between the wid...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More