Driving mechanism of omnidirectional mobile robot
A technology of all-round movement and transmission mechanism, applied in the field of robots, can solve problems such as no lateral movement, achieve the effect of increasing adaptability, increasing accurate measurement, and ensuring coordination
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] The present invention will be further described below in conjunction with accompanying drawing.
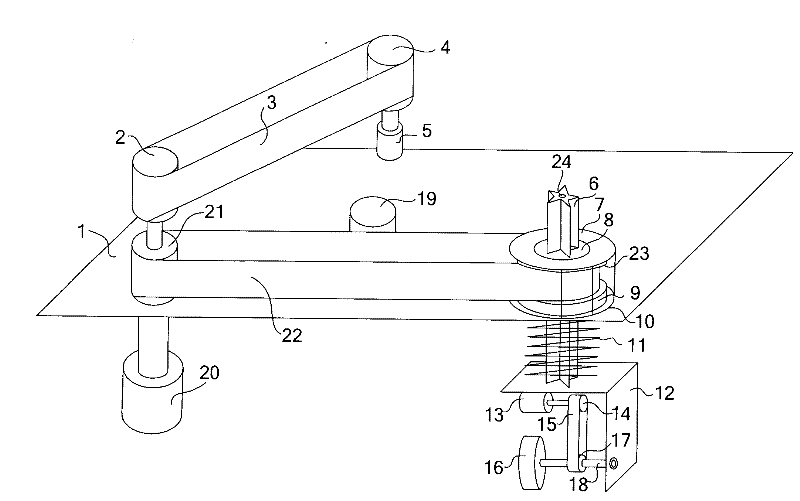
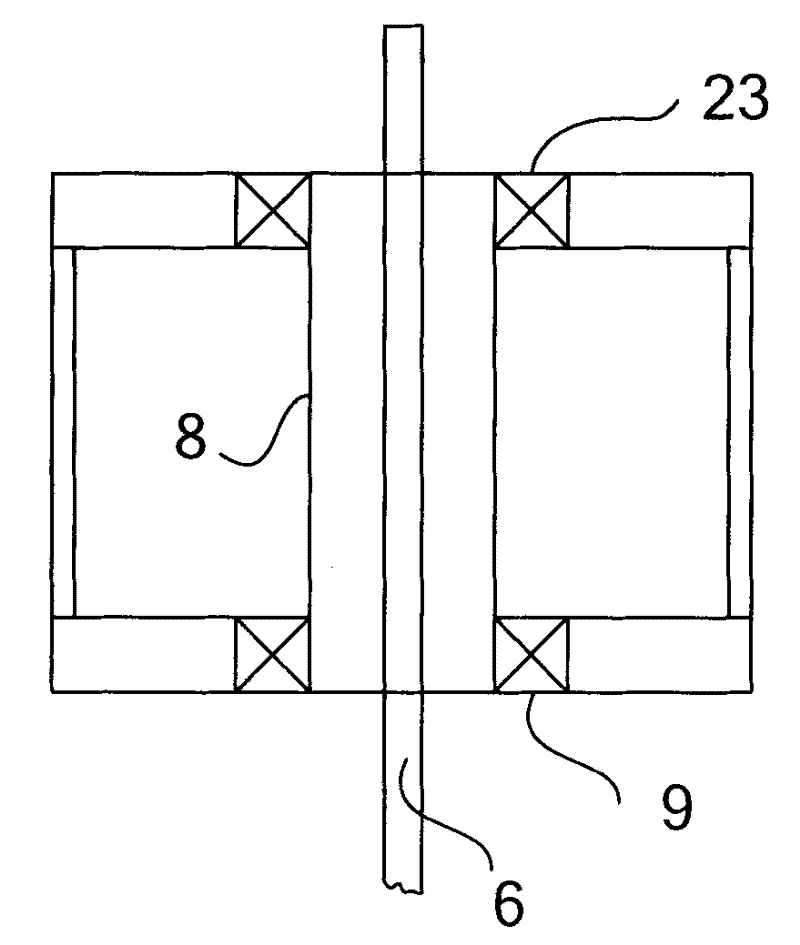
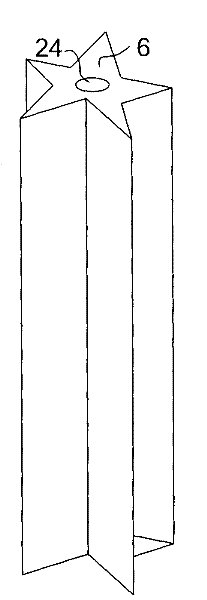
[0015] Such as figure 1 and figure 2 As shown, a transmission mechanism of an omnidirectional mobile robot includes a base plate 1, a rotation drive motor 20, an active rotation transmission wheel 21, a passive rotation transmission wheel 8, a rotation transmission belt 22, a pressure belt wheel 19, a rotation shaft 6, and an active rotation measurement wheel 2, passive rotation measurement wheel 4, sensor measurement transmission belt 3, encoder 5, and servo motor 13, scroll wheel 16, damping spring 11, wheel support 12, active rolling pulley 14, passive rolling pulley 17, belt drive belt 15.
[0016] The base plate 1 is a flat plate arranged horizontally, and the rotation drive motor 20 is installed under the base plate 1 through the motor flange. Measuring wheel 2 and active rotation transmission wheel 21. The active rotating measuring wheel 2 is connected with the p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com