

Walk-aiding exoskeleton robot system and control method
An exoskeleton robot and bone technology, which is applied in the field of rehabilitation engineering, can solve the problems of patient movement difficulties and quality restrictions, and achieve the effects of compact design structure, improved stability and high control precision.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The embodiments of the present invention are described in detail below. This embodiment is implemented on the premise of the technical solution of the present invention, and detailed implementation methods and specific operating procedures are provided, but the protection scope of the present invention is not limited to the following implementation example.
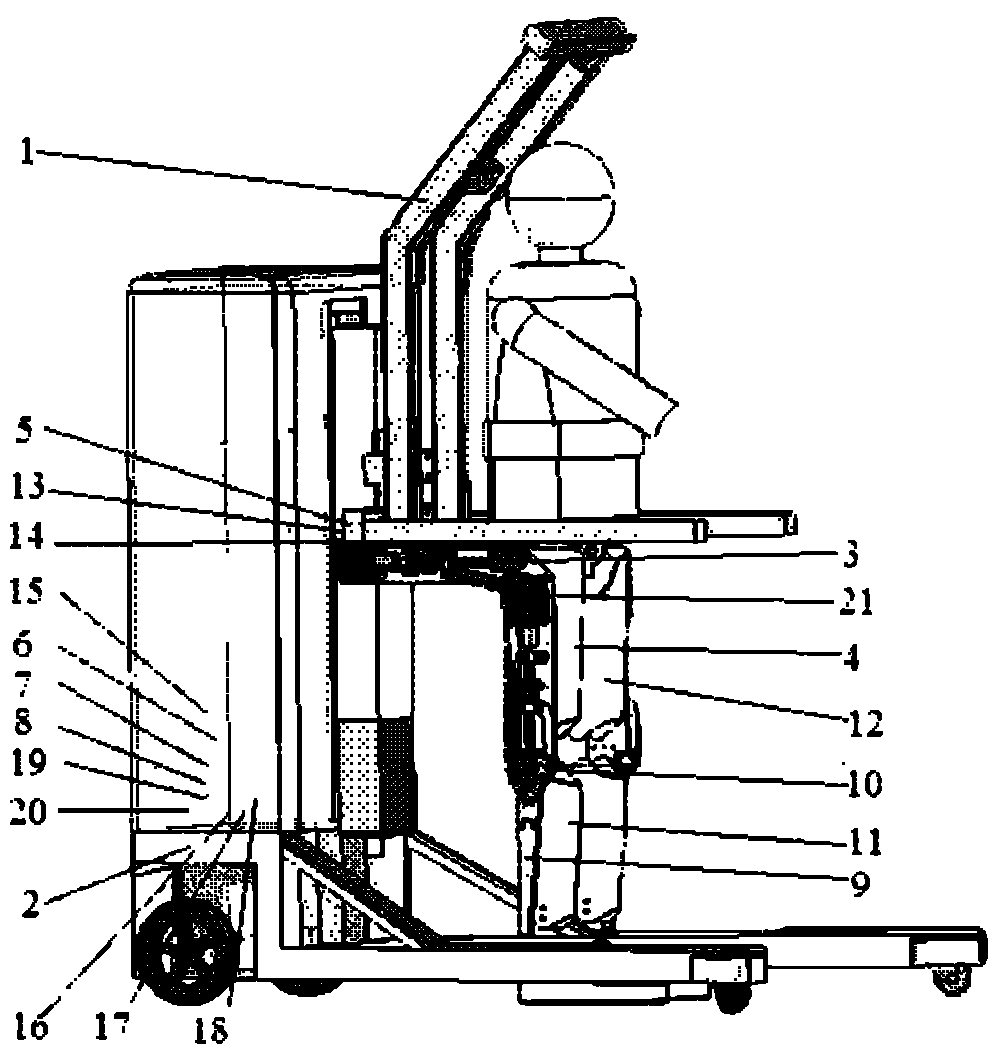
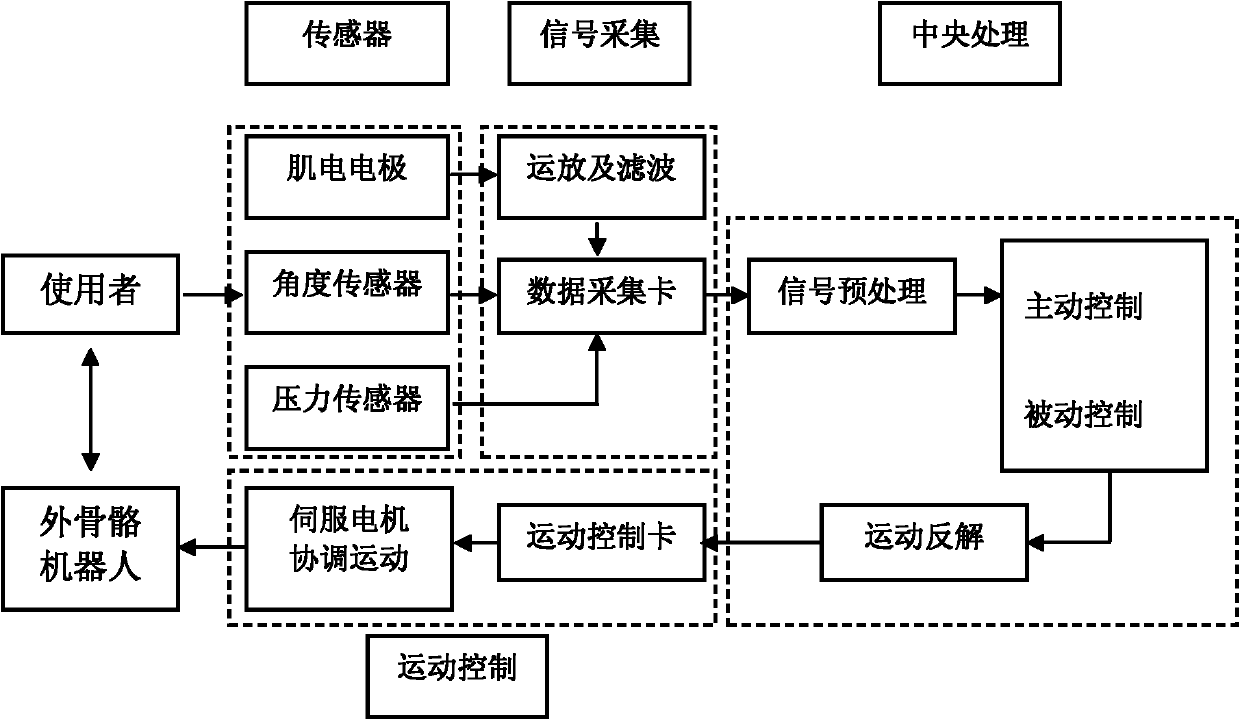
[0031] Such as figure 1 and figure 2 As shown, this embodiment includes: a suspension bracket 1, a mobile platform 2, a bone joint 3, a protective cover 4, a sensor module 5, a signal acquisition module 6, a central processing module 7 and a motion control module 8, wherein: the suspension bracket 1 is fixedly arranged On the mobile platform 2, the skeletal joint 3 is connected with the suspension bracket 1 to form an exoskeleton robot 9, the sensor module 5, the signal acquisition module 6, the central processing module 7 and the motion control module 8 are sequentially connected, and the joint angle is collecte...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More