

Dynamic loading methods based on servo motor
A technology of dynamic loading and servo motors, which is applied in the direction of engine testing, machine/structural component testing, and measuring devices. It can solve the problems that the characteristics of DC motors cannot meet the needs of electric loading systems, and achieve good application prospects and operation. Easy, high-precision results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
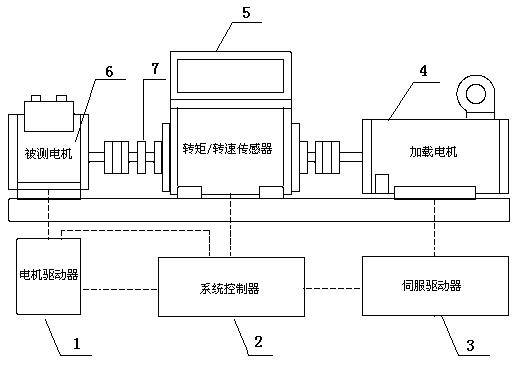
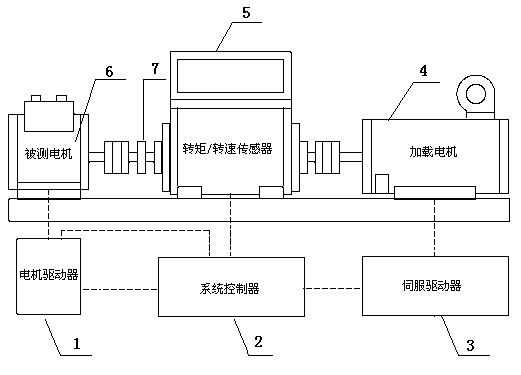
[0018] Specific implementation mode one: the following combination figure 1 To illustrate this embodiment, the device used in the method described in this embodiment includes a motor driver 1, a system controller 2, a servo driver 3, a loading motor 4, a torque / speed sensor 5, a motor under test 6 and an additional inertia disk 7, The loading motor 4, the torque / speed sensor 5 and the tested motor 6 are placed together on the test platform, the torque / speed sensor 5 is arranged between the loading motor 4 and the tested motor 6, the rotating shaft of the tested motor 6 and the torque The rotating shaft of the / speed sensor 5 is connected with a shaft coupling, the rotating shaft of the loading motor 4 is connected with the rotating shaft of the torque / speed sensor 5 with a coupling, and the rotating shaft of the loading motor 4 is provided with an additional inertia disk 7, The sum of the rotor inertia of the loading motor 4, the inertia of the torque / speed sensor 5, the inert...
specific Embodiment approach 2
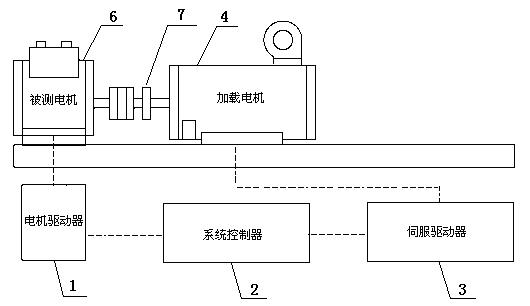
[0032]Specific implementation mode two: the following combination figure 2 Describe this embodiment, the device used in the method described in this embodiment includes a motor driver 1, a system controller 2, a servo driver 3, a loading motor 4, a motor under test 6 and an additional inertia disk 7, the load motor 4 and the motor under test 6 are placed together on the test platform, the rotating shaft of the tested motor 6 and the rotating shaft of the loading motor 5 are connected by a coupling, and the rotating shaft of the loading motor 4 is provided with an additional inertia disk 7, the rotor inertia of the loading motor 4, additional The sum of the inertia of the inertia disk 7 and the inertia of the shaft coupling is equal to the actual load inertia of the motor 6 under test,
[0033] The specific process of the dynamic loading method based on the servo motor is as follows:
[0034] First, the torque / speed sensor is used to calibrate the torque of the loading motor ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More