

Servo double-arm clamping type bag feeding manipulator with slotting tools
A manipulator and clamp technology, applied in the field of automatic packaging machinery, can solve the problems of fast bagging, shock and vibration, etc., and achieve the effect of strong dust resistance, good stability and lower product cost.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The present invention will be further described below in conjunction with specific drawings and embodiments.
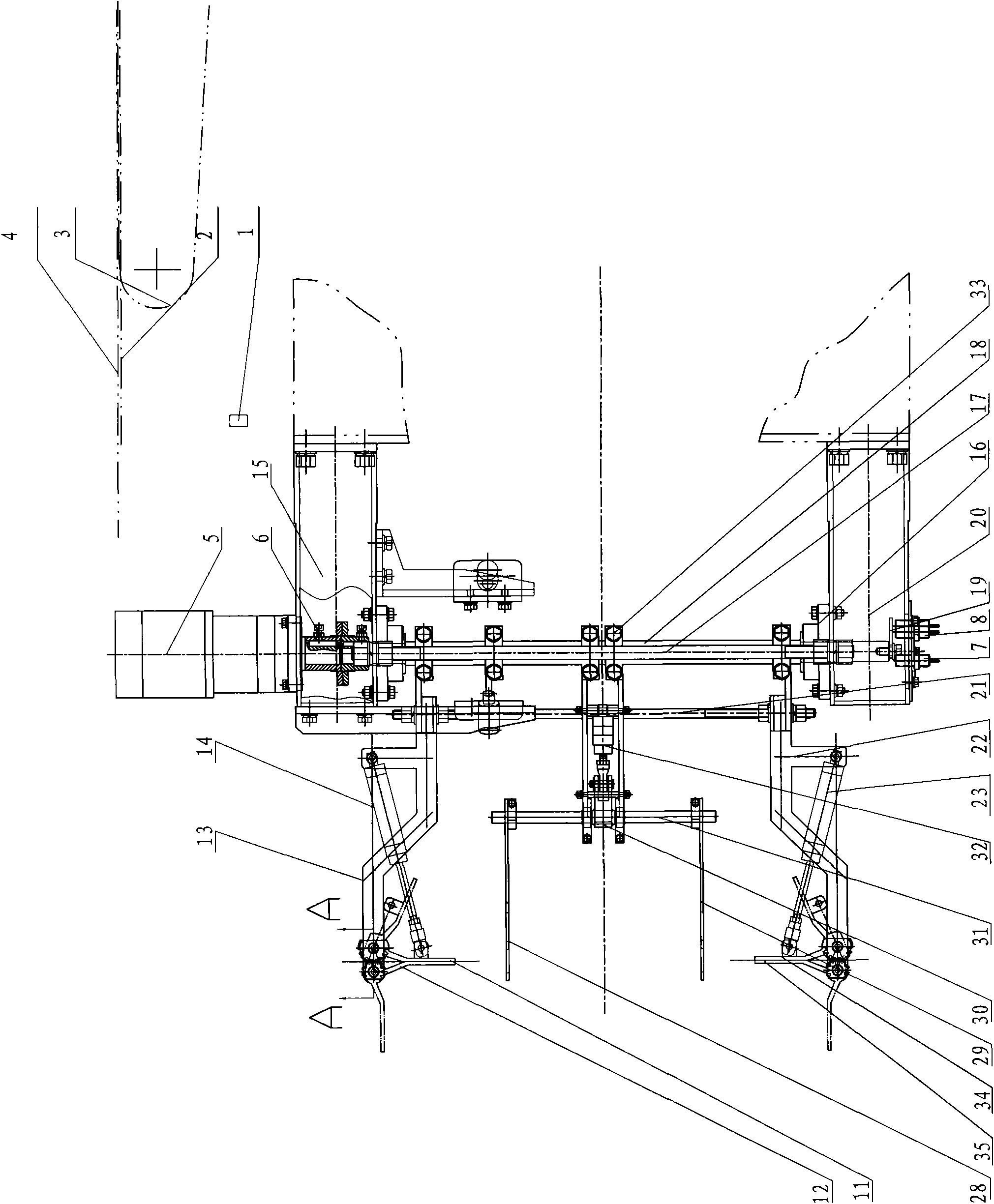
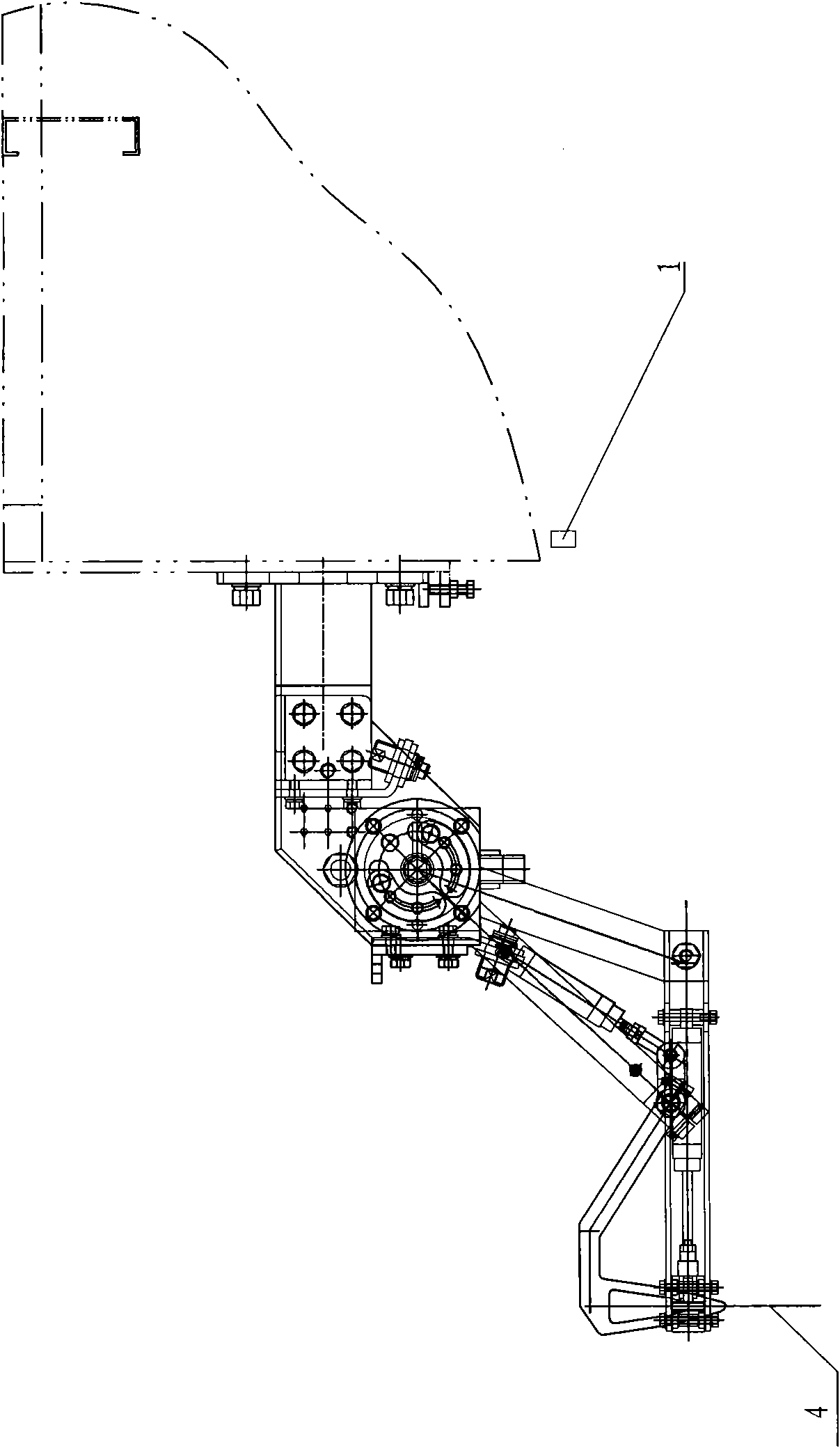
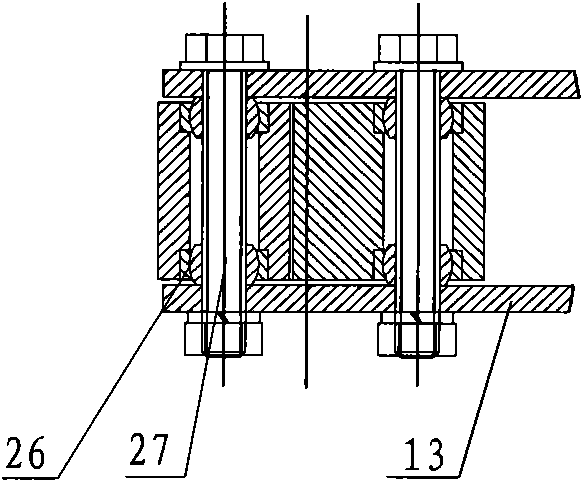
[0022] As shown in the figure, the present invention is mainly composed of through-beam photoelectricity 1, fully automatic bagging machine support platform 2, bag feeding synchronous belt 3, packaging bag 4, servo motor 5, coupling 6, bag clamping position proximity switch 7 , Proximity switch 8 to be clamped, small gear clamp 11, large gear clamp 12, left upper bag arm 13, first cylinder 14, left base frame 15, belt seat bearing 16, rotating shaft 17, connecting rod 18, metal sheet 19. Right base frame 20, screw rod 21, right upper bag arm 22, second cylinder 23, radial joint bearing 26, bolt shaft 27, left slotting knife 28, right slotting knife 29, transmission part 30, slotting knife shaft 31, the third cylinder 32, mounting frame 33, right side large gear clamp 34 and right side pinion gear clamp 35 and other parts constitute.
[0023] The servo double-a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More