

Intervention operation catheter clamping jaw with dual force feedback function
A technology for interventional surgery and catheter clips, applied in the direction of catheters, etc., can solve the problems of inability to push-pull force and torsional force feedback of catheters, and achieve the effects of accurate and reliable data, high detection accuracy, and rapidity assurance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
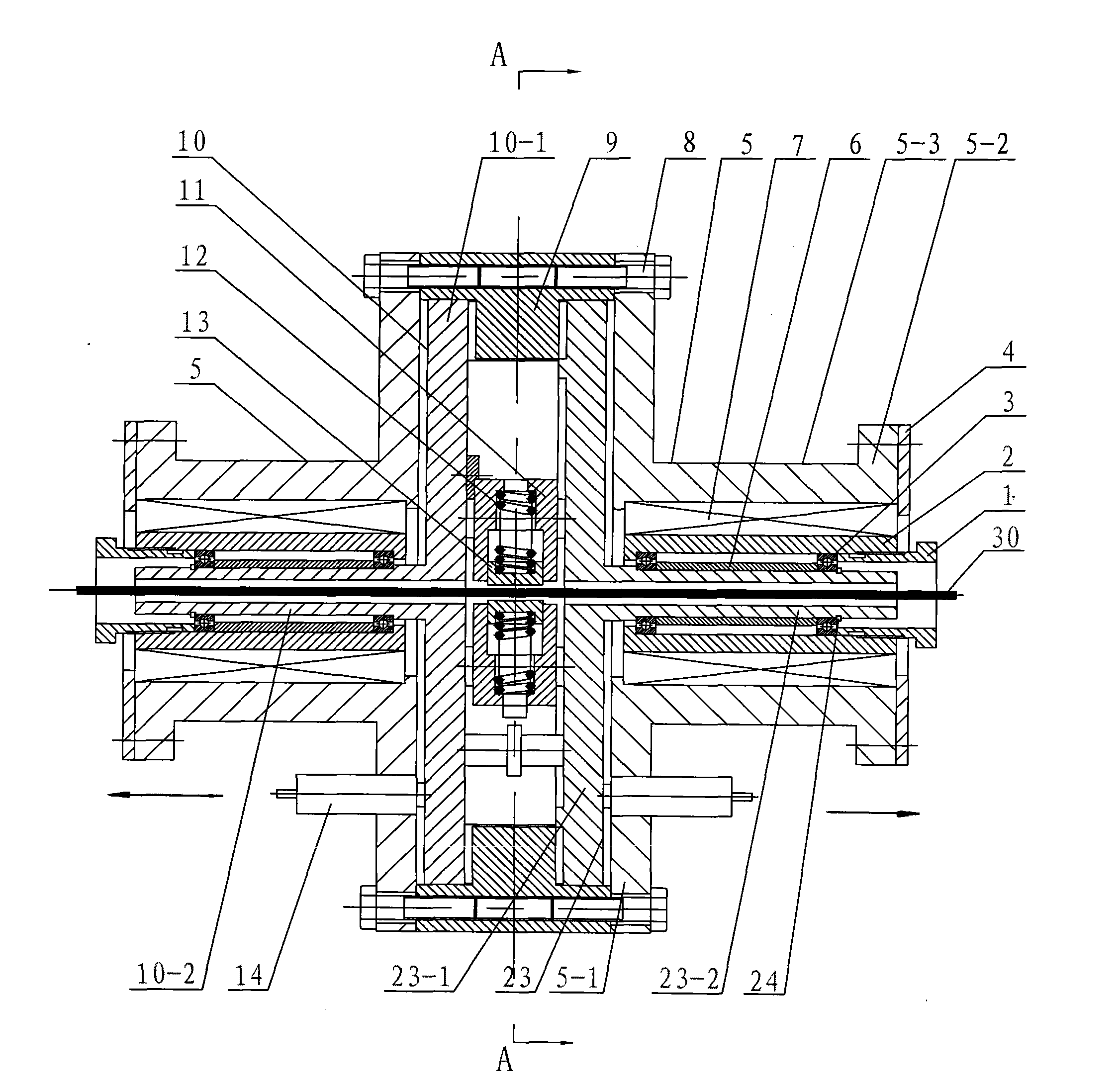
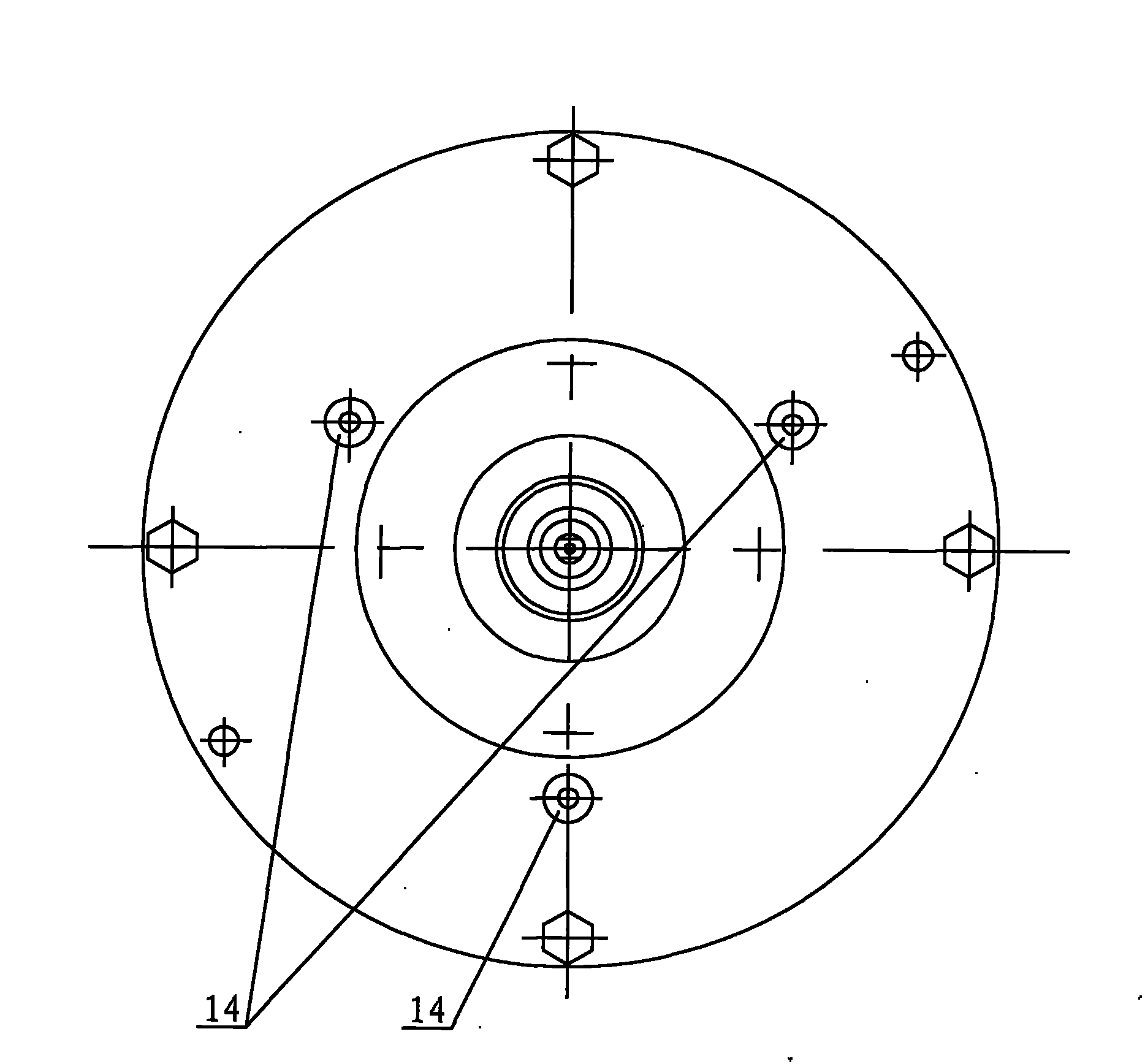
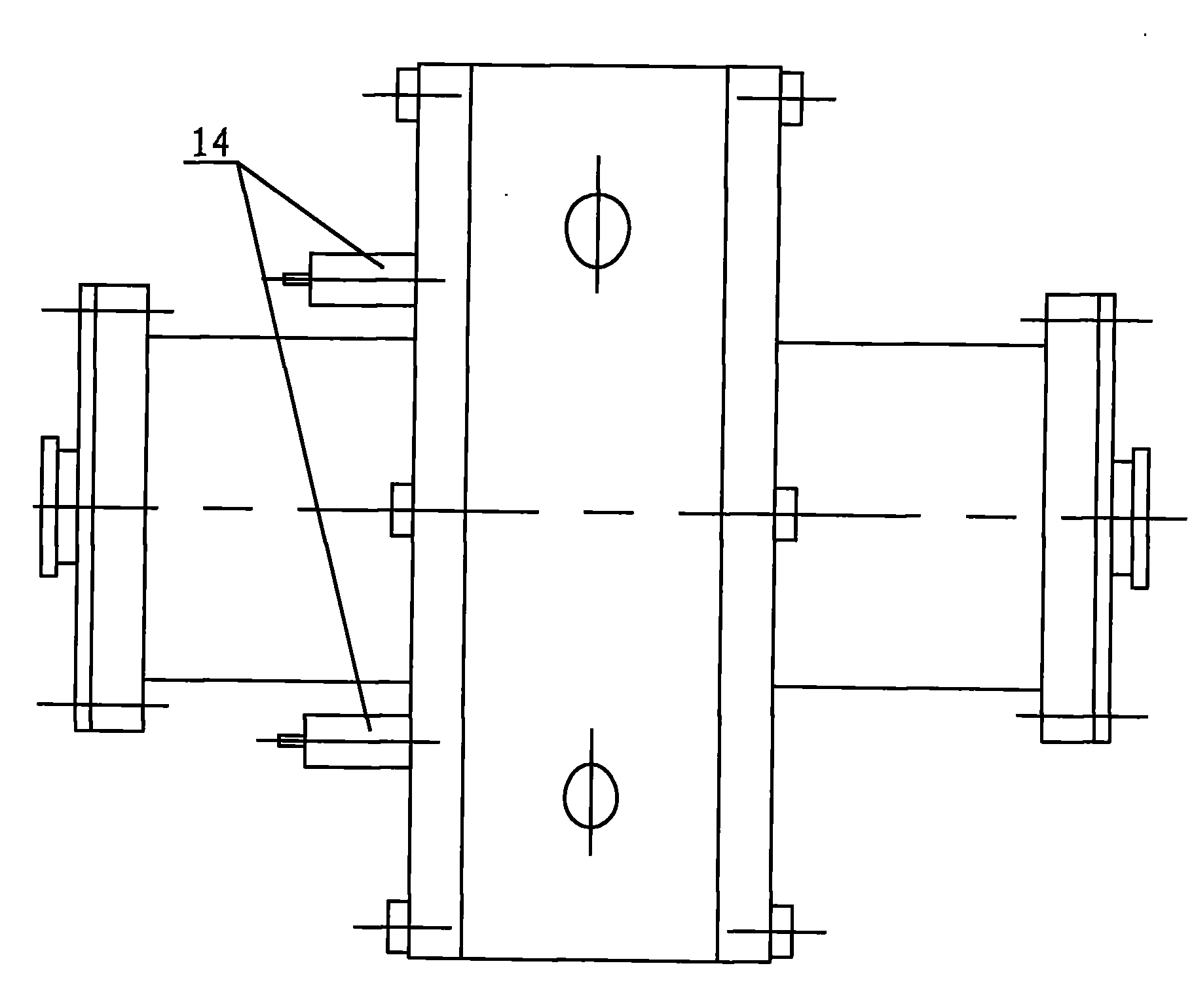
[0007] Specific implementation mode one: combine Figure 1 to Figure 7 Describe this embodiment, the catheter jaw of this embodiment includes an outer torsion ring 9, an inner torsion ring 10, an inner ring end cover 23, two connectors 5, two sleeve-type linear motion bearings 7, and two compression springs 12 , two clamping discs 13, two electromagnets 15, six thrust sensors 14, four torsion sensors 19, two fasteners 1, two sliding sleeves 2, four deep groove ball bearings 3, two One outer end cover 4, two inner sleeves 6, two spring fixing parts 11, four pulleys 16, four pulley shafts 17, two steel wire ropes 18, two circlips 24 and two armatures 25; each The connecting piece 5 is provided with an axial central shoulder through hole, and each connecting piece 5 is made of an integral large flange 5-1, a small flange 5-2, and is arranged on the large flange 5-1 and the small flange. The transition sleeve 5-3 between the disks 5-2 is composed of the large flanges 5-1 of the t...
specific Embodiment approach 2
[0011] Specific implementation mode two: combination figure 1To describe this embodiment, the axial central through hole of the inner torsion ring 10 and the inner ring end cover 23 of this embodiment is arranged coaxially. Such arrangement facilitates the penetration of the catheter 30 . Others are the same as in the first embodiment.
specific Embodiment approach 3
[0012] Specific implementation mode three: combination figure 1 and Figure 4 Describe this embodiment, the difference between this embodiment and specific embodiment 1 is: the conduit jaw of this embodiment also includes four fixed shafts 20; -1 is affixed to the inner ring cover 23-1. Such setting has the advantage of reliable connection.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More