Image point matching method for industrial digital photogrammetry
What is AI technical title?
AI technical title is built by PatSnap AI team. It summarizes the technical point description of the patent document.
A technology of image point matching and point matching, which is applied in the field of image point matching for industrial digital photogrammetry, and can solve the problems of large error and large amount of calculation
Active Publication Date: 2010-09-29
THE PLA INFORMATION ENG UNIV
View PDF4 Cites 9 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
[0021] The purpose of the present invention is to provide an image point matching method for industrial digital photogrammetry that can realize fast and accurate image point matching, so as to solve the problems of large amount of calculation and large error in existing matching methods
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
Embodiment 1
[0051] The image point matching method based on nuclear surface constraints of three photos, the flow chart of this method is as follows Figure 5 As shown, the specific steps are as follows:
[0052] (1) Transform the coordinates of all image points on the three photos into the object space coordinate system;
[0053] (2) Select a photo Each unmatched image point on the target image point is calculated as the target image point in the other two photos , Corresponding nuclear surface on , ;
[0054] (3) Set the distance threshold , calculate the image respectively , From each candidate image point to the corresponding nuclear surface , the distance ,like , then the corresponding candidate image point is marked as the initial matching image point, and the two images , The initial matching image point set on is denoted as the initial set , ;
[0055] (4) If the initial set , If at least one of them is empty, the matching of the target image p...
Embodiment 2
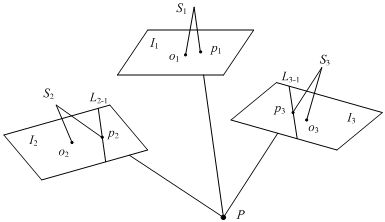
[0069] It can be seen from the aforementioned matching process that theoretically only two photos can be used for matching, but due to the interference of errors, it is necessary to use the third photo to eliminate the false matching caused by errors. How to select these three photos, that is, how to group all the photos, should consider the geometric relationship among the photos.
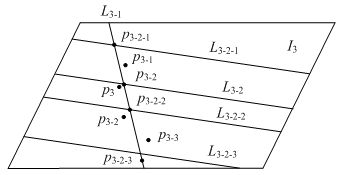
[0070] like Figure 7 Shown, the 3rd photo The reason why the mismatch is eliminated is that the nuclear surface and intersect, reflected in the photo above is the nuclear line and Intersect at the image point of the same name . If in nuclear surface Interference image points exist on , its in the photo image point of the same name on not on nuclear surface Therefore, there will be no mismatch. but if , , , The four points are coplanar, then the core plane and overlap, dot will be at the core inside, so that , All may be pixels with the same name, resul...
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
Abstract
The invention relates to an image point matching method for industrial digital photogrammetry. In the method, distances from image points to be matched to corresponding epipolar planes are utilized as constraint conditions, and images are grouped according to known points. The method comprises the following steps of: firstly, sorting the images into a plurality of groups according to whether containing the same object points; then, combining and matching parts of each group of images with better calculated geometrical quality; and finally, reversely calculating same-name image points on other images by utilizing the object points. By using the method, the matching speed and the matching accuracy can be improved. Proved by tests, compared with an image point matching method based on epipolar constraint, the method has less computation and small error.
Description
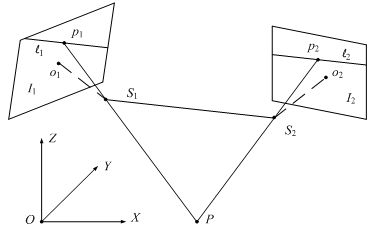
technical field [0001] The invention relates to an image point matching method for industrial digital photogrammetry. Background technique [0002] Image point matching is to determine the corresponding image points of the same name corresponding to object space points on different photos, which is one of the key technologies to realize the automation of photogrammetry. When the reflective sign is used as the measurement point, the images of each sign have basically the same gray distribution law, so it is difficult to achieve automatic matching by using a matching algorithm based on gray level correlation. Therefore, in industrial digital photogrammetry, the automatic matching of image points can only be completed by using the spatial geometric relationship between the same-named image points. [0003] The epipolar constraint is an important constraint to solve the matching of photogrammetric image points with the same name. figure 1 Shown is a stereo pair, object space p...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.



 Login to View More
Login to View More  Login to View More
Login to View More