

Robot simulated jump aid
A technology of robots and mounting holes, applied in the field of robots, can solve the problem of not exerting the bionic function of the feet and so on
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
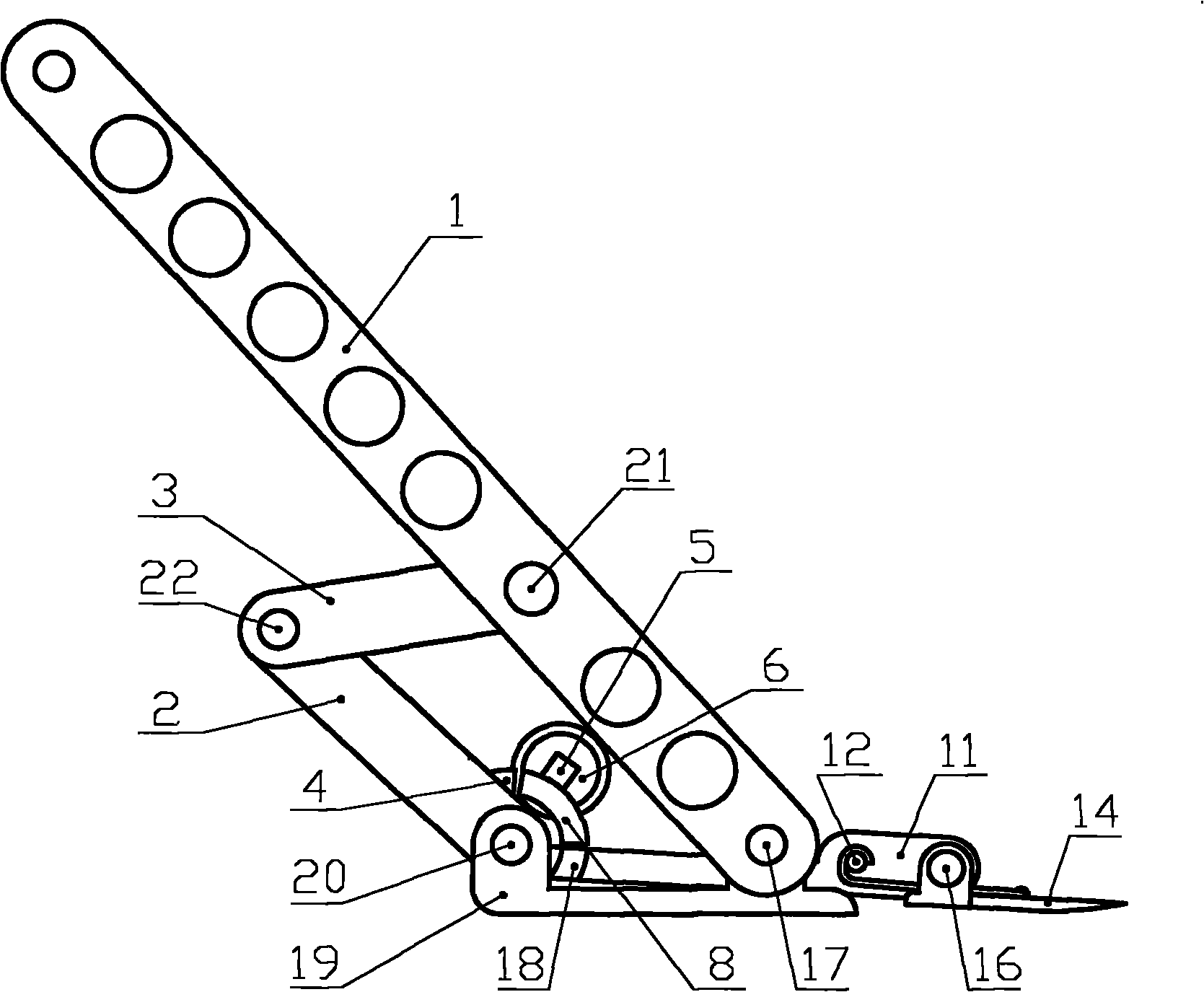
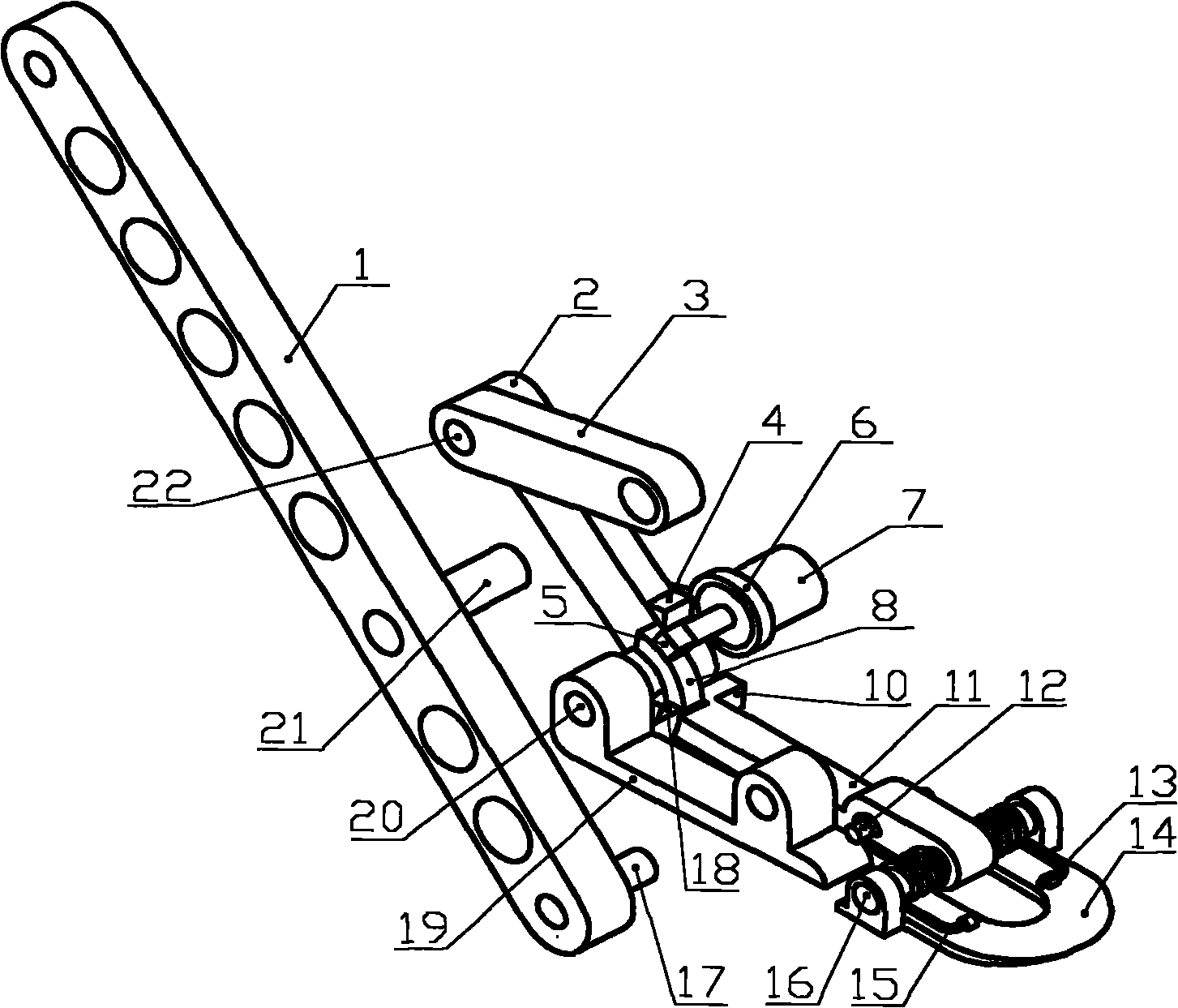
[0037] This embodiment is a bionic jump-aiding device, which is mainly composed of a planar linkage mechanism with variable structure to prolong the contact time between the feet and the ground during take-off, obtain a higher ground-off speed, and improve the bionic effect of jumping performance.
[0038] Such as Figure 1 ~ Figure 2 As shown, the present embodiment includes a parallelogram linkage mechanism composed of leg connecting rod 1, rocker 2, connecting rod 3 and support 19, and the ratio of the long side to the short side of the parallelogram linkage mechanism is 4: 3. In the above linkage mechanism, one end of the rocker 2 is hinged with the connecting rod 3 through the rocker shaft 22, and the other end is hinged with the support 19 through the ankle joint shaft 20; one end of the leg connecting rod 1 is passed through The bearing rotating shaft 17 is hinged with the bearing 19, and the middle part of the leg connecting rod 1 is hinged with the connecting rod 3 th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More