Robot parallel mechanism with rotation and lifting two degrees of freedom
A technology of rotating lifting and rotating mechanisms, applied in the direction of manufacturing tools, auxiliary devices, auxiliary welding equipment, etc., can solve the problems of invisibility and inconvenience, and achieve the effect of convenient processing, easy installation and disassembly, and easy control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
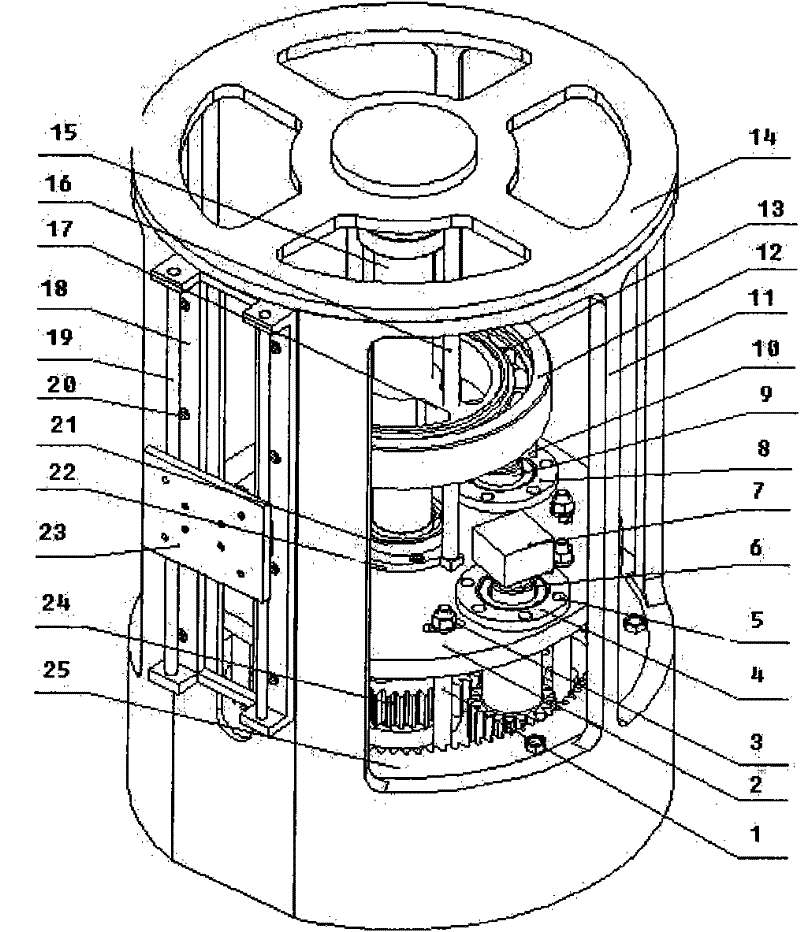
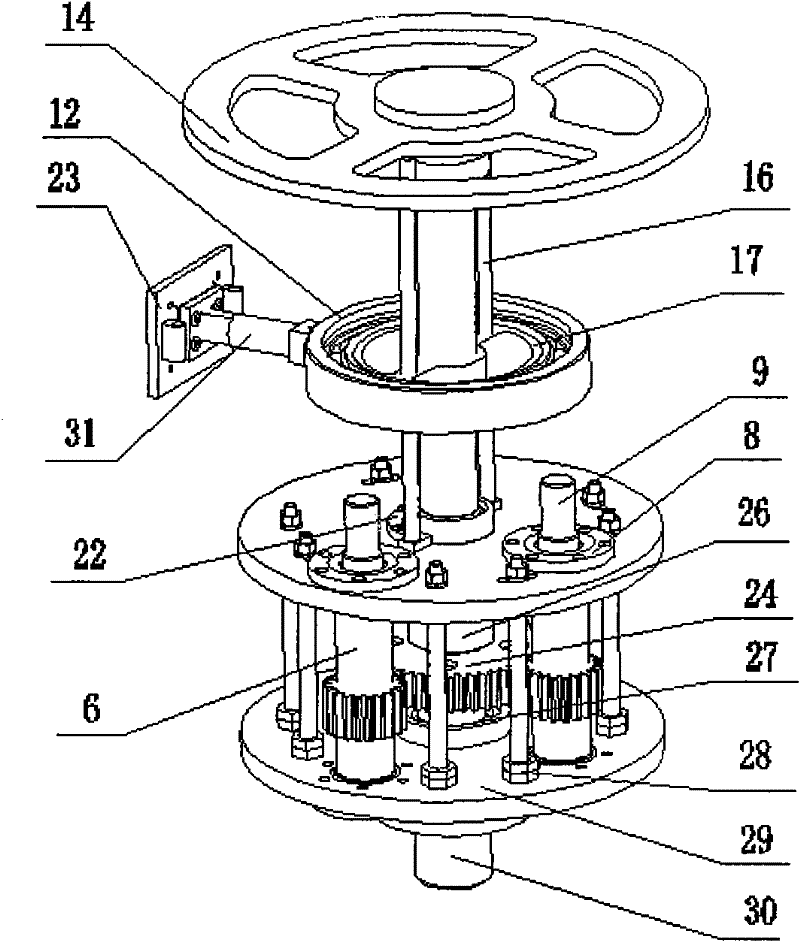
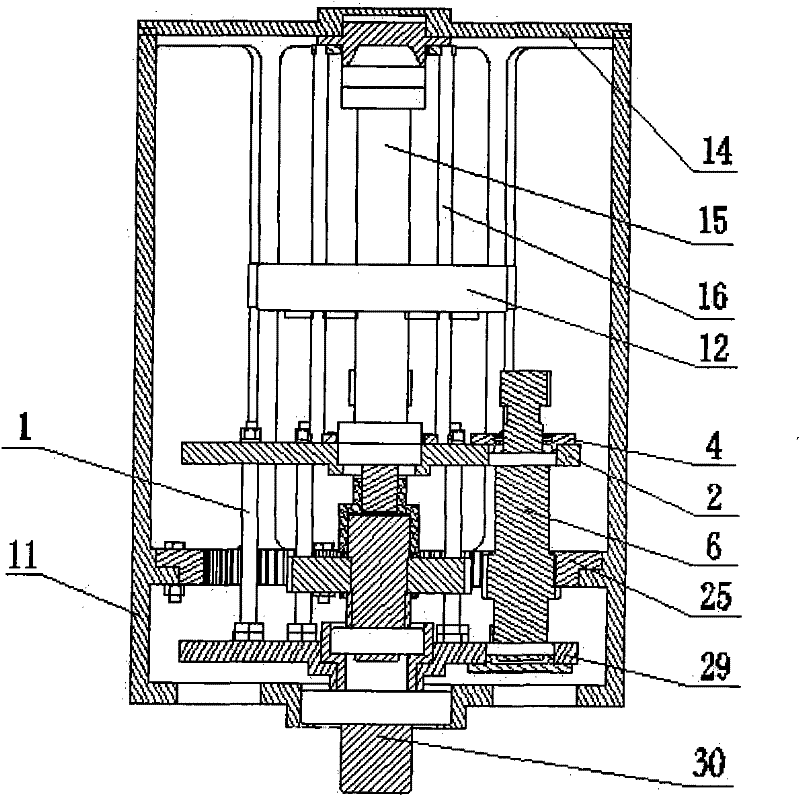
[0018] Depend on Figure 1 to Figure 7 It can be seen from the embodiments of the present invention that the mechanism provided by the present invention has two degrees of freedom of rotation and elevation. The rotation is realized by the internal meshing of the gears, and the lifting is realized by the lead screw. The two degrees of freedom are decoupled through the nut bearing 13, and the two degrees of freedom are independent of each other and do not interfere with each other, forming a parallel mechanism. The frame is fixed relative to the world coordinate system, and it is threaded by the upper fixed plate 2 and the lower fixed plate 29 through the connecting rod 1, and the frame bottom is equipped with an organic base 30, which anchors the whole mechanism on the workpiece.
[0019] When the driving motor I7 starts, the driving motor I7 transmits the rotational motion to the gear shaft I6, and the gear shaft I6 is installed in the mounting hole of the frame, and the gear...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More