

Multivariable time-lag parameter estimation method based on FIR (Finite Impulse Response) model identification
A technology of parameter estimation and model identification, applied in digital technology networks, impedance networks, electrical components, etc., can solve problems such as poor applicability and low accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0067] The present invention will be further described below in conjunction with the accompanying drawings.
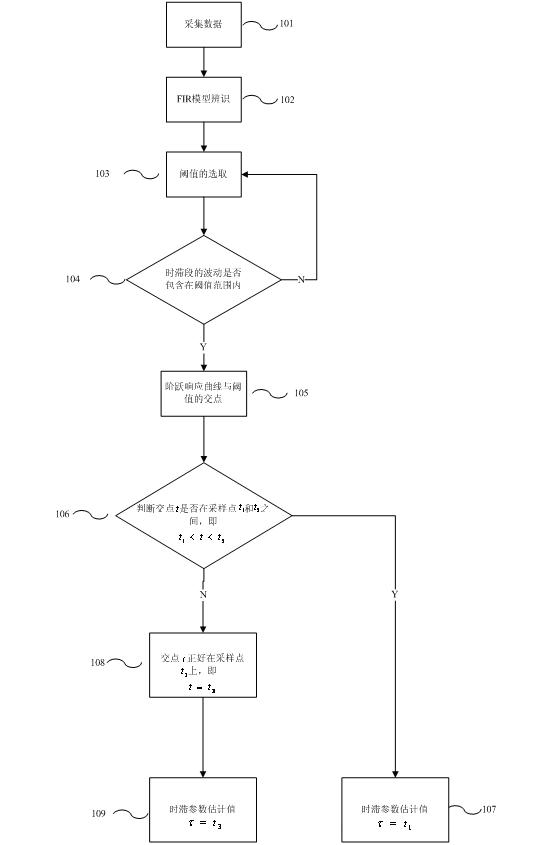
[0068] refer to Figure 1~Figure 4 , a multivariate time-delay parameter estimation method based on FIR model identification, the specific steps are as follows:
[0069] Step 101: Collecting input and output data of the system. Perform open-loop test experiments on multivariable systems to obtain relevant input and output data.
[0070] Step 102: Perform FIR model identification on the collected data.
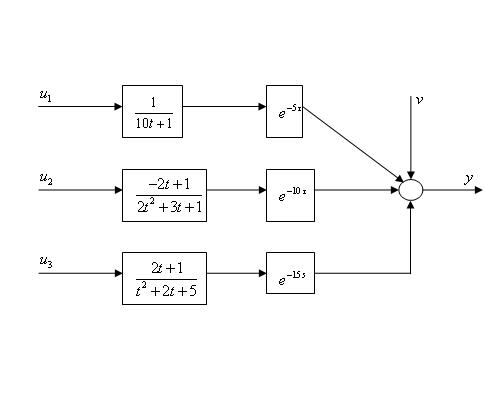
[0071] Considering the m-input n-output model, each output is affected by m inputs, then the whole system is composed of n m-input single-output. Therefore, the identification of the FIR model in the case of MIMO needs to be performed n times. The following is an illustration of the case of m input and n output.
[0072] For the jth output , where, 1≤j≤n, given its FIR model as formula (1):
[0073]
[0074] Indicates the first the first output variable ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More