

Camera calibration method and system for object three-dimensional geometrical reconstruction
A three-dimensional geometry and calibration technology, applied in the fields of three-dimensional geometric modeling, computer image processing, computer vision, and computer technology, can solve the problems that three-dimensional reconstruction technology is not suitable for three-dimensional reconstruction and difficult to apply three-dimensional reconstruction technology, and achieves reliable and reliable algorithms. Wide range of effects with simple reconstruction process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0069] The present invention will be described in more detail below through specific embodiments in conjunction with the accompanying drawings.
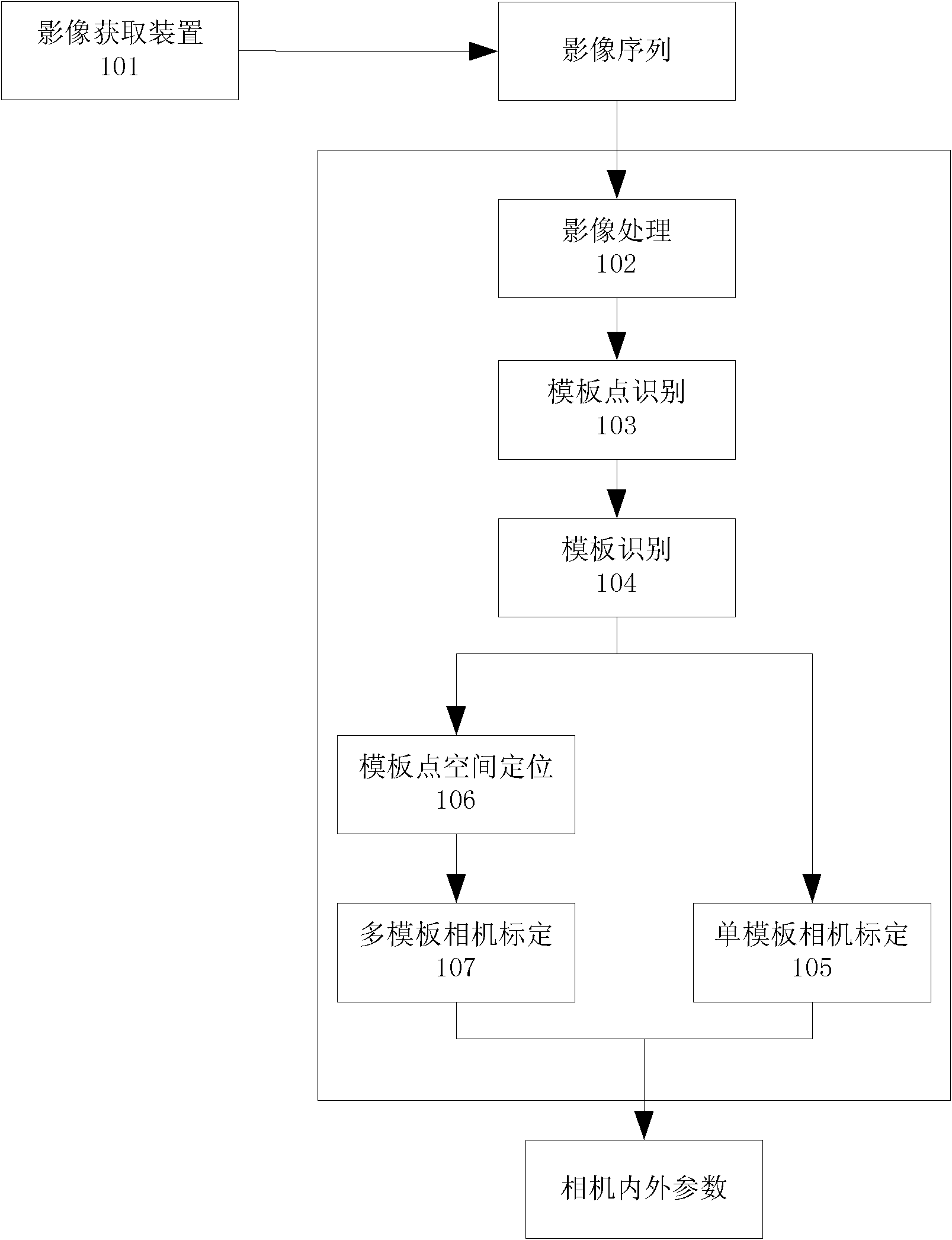
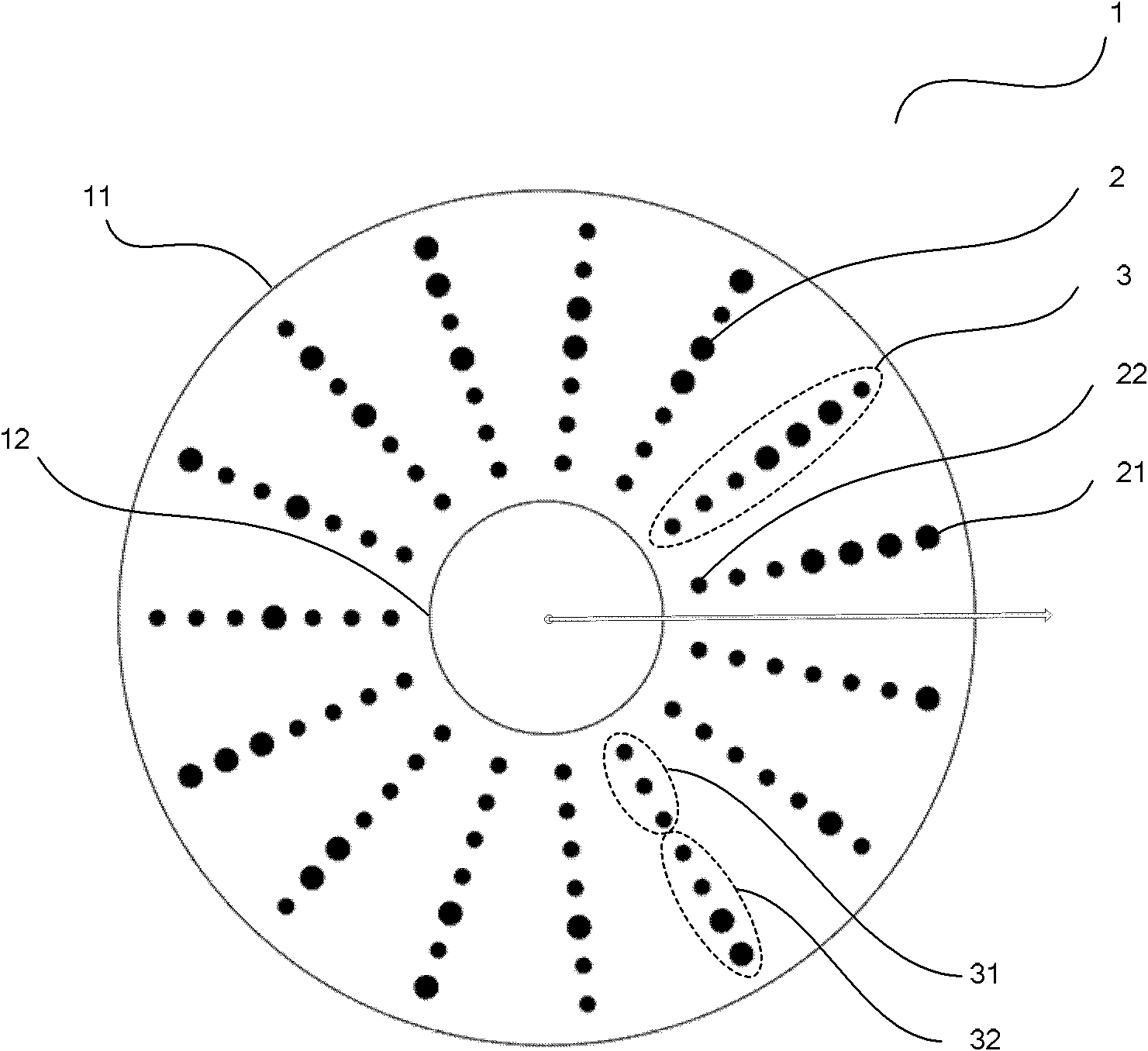
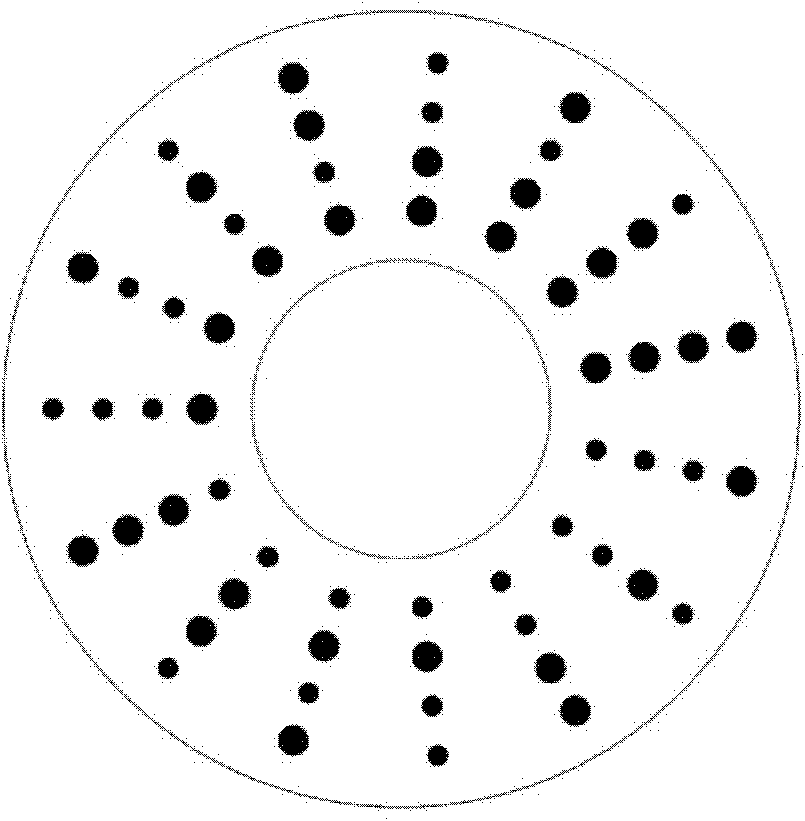
[0070] The following embodiment provides a camera calibration method, generally speaking, the method includes the following aspects: a calibration template encoding method, used for identification of calibration templates during three-dimensional reconstruction of large, medium and small objects; The calibration template layout and image acquisition method are used to arrange the calibration template in the scene containing the three-dimensional object to be reconstructed and obtain a series of images; the image processing method processes the acquired images to obtain all visible calibration templates in the image The calibration point outline; the calibration point recognition method is used to identify and distinguish template calibration points and template calibration point groups from the contour set; the template recognition me...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More