

Rotary input robot for testing oscillating performance of overhead power transmission line
A technology of overhead transmission lines and robots, which is applied in vibration testing, testing of machines/structural components, manipulators, etc., can solve problems such as increasing complexity, and achieve the effects of convenient installation and layout, reducing complexity, and improving rigidity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
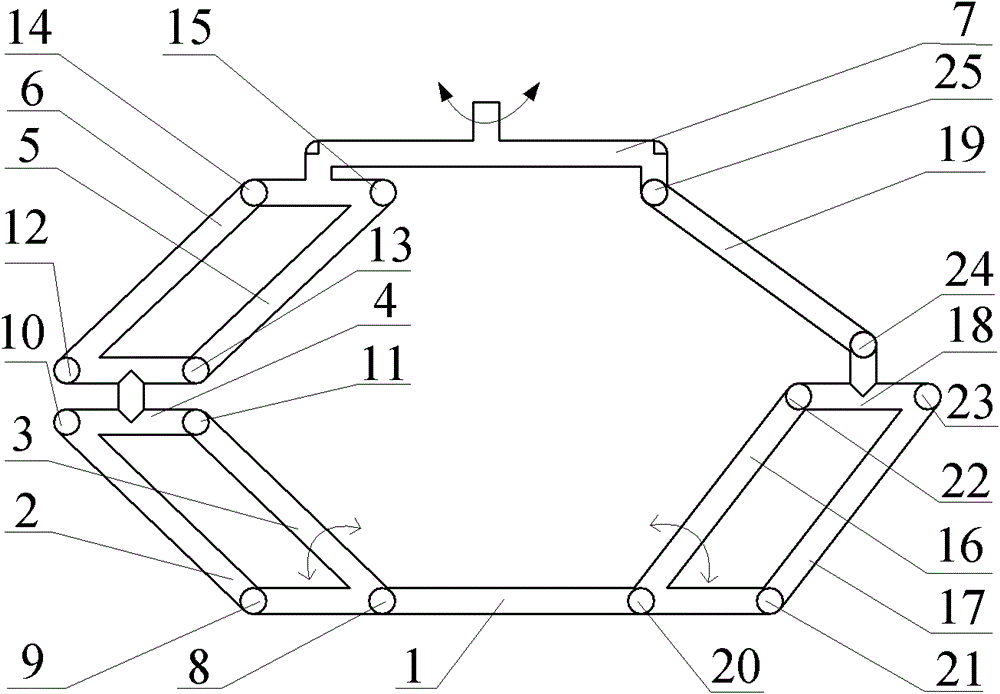
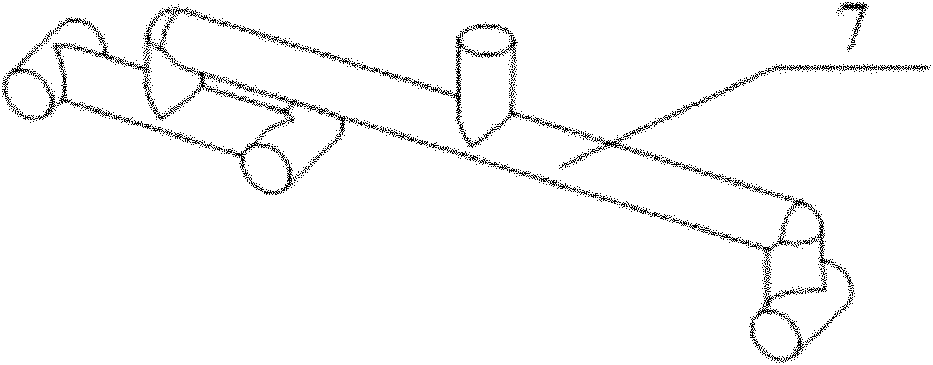
[0026] Such as figure 1 As shown, the robot includes a frame 1 and an end effector 7, one end of the end effector 7 is connected to the frame 1 through a first branch, and the other end of the end effector 7 is connected to the frame 1 through a second branch.
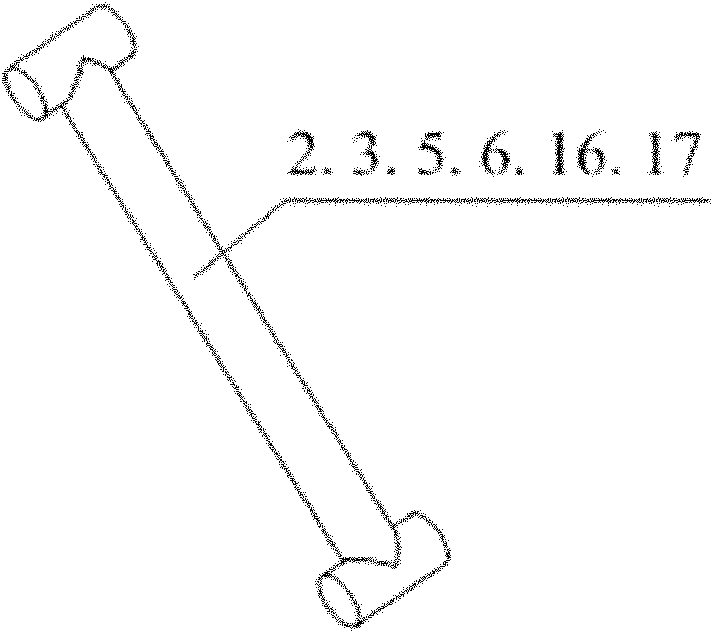
[0027] The first branch includes the first connecting piece 4, two first connecting rods 2, 3, two first connecting rods 5, 6, four first rotating pairs 8, 9, 10, 11 and four second rotating pairs Deputy 12, 13, 14, 15. The first rotating pair 8 of the first branch connects the frame 1 with the first connecting rod 3, the first connecting rod 3 is connected with the first connecting member 4 through the first rotating pair 11, and the first rotating pair 9 connects the first connecting rod. Frame bar 2, the first connecting frame bar 2 is connected with the connecting piece 4 through the rotating pair 10, that is, the frame 1, the first connecting frame bar 2, the first connecting frame bar 3 and the first connecting ...
Embodiment 2
[0032] The structure and working principle of the robot described in this example are basically the same as those in Embodiment 1, except that:
[0033] Such as Figure 6As shown, the second branch I of the robot in Embodiment 1 is replaced with the second branch II in this example, and the second branch II includes a third connecting frame rod 26, a moving pair 27, a third connecting rod 30 and two second connecting rods. Five rotation pairs 28, 29, the third connecting rod 30 is connected with the third connecting rod 26 through the moving pair 27, the third connecting rod 30 is connected with the end effector 7 through the fifth rotating pair 28, and the third connecting rod 26 is connected through The fifth revolving pair 29 is connected with the frame 1; the structure of the first branch of the robot is exactly the same as that of the first embodiment, and will not be repeated here. The axes of the four first rotating pairs 8, 9, 10, 11, the four second rotating pairs 12...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More