

Calibration method of camera and inertial sensor integrated positioning and attitude determining system
An inertial sensor and combined positioning technology, applied in the field of cameras, can solve problems such as low heading angle accuracy, achieve the effects of good robustness, practical calibration, and avoid system calibration errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] Various details involved in the technical solution of the present invention will be described in detail below in conjunction with the accompanying drawings. It should be pointed out that the described embodiments are only intended to facilitate the understanding of the present invention, rather than limiting it in any way.
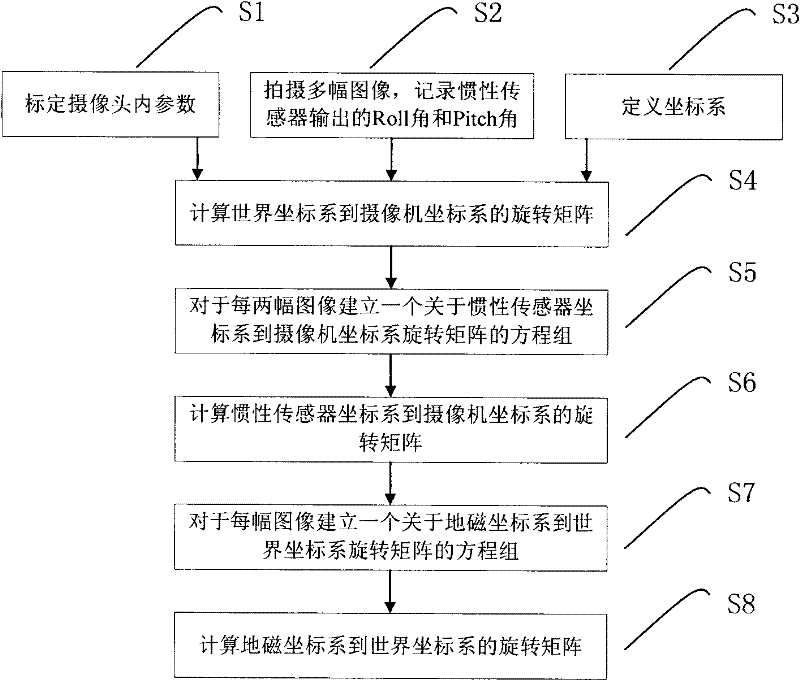
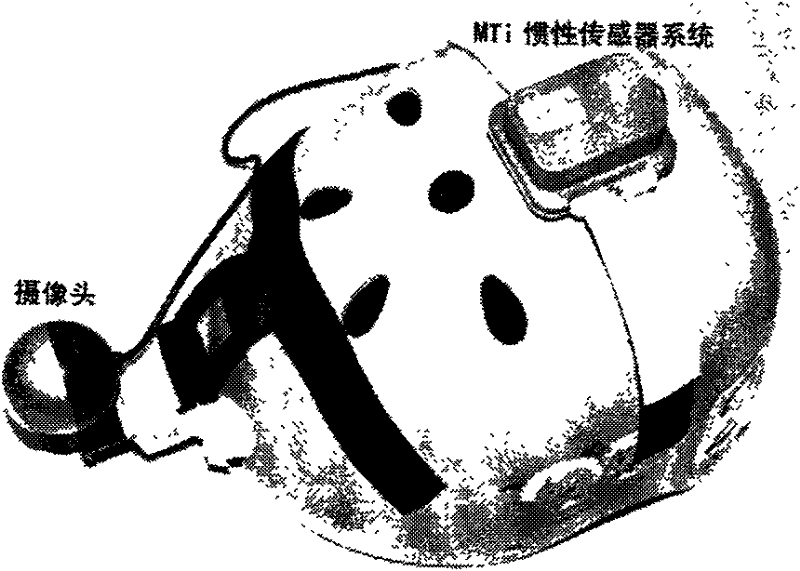
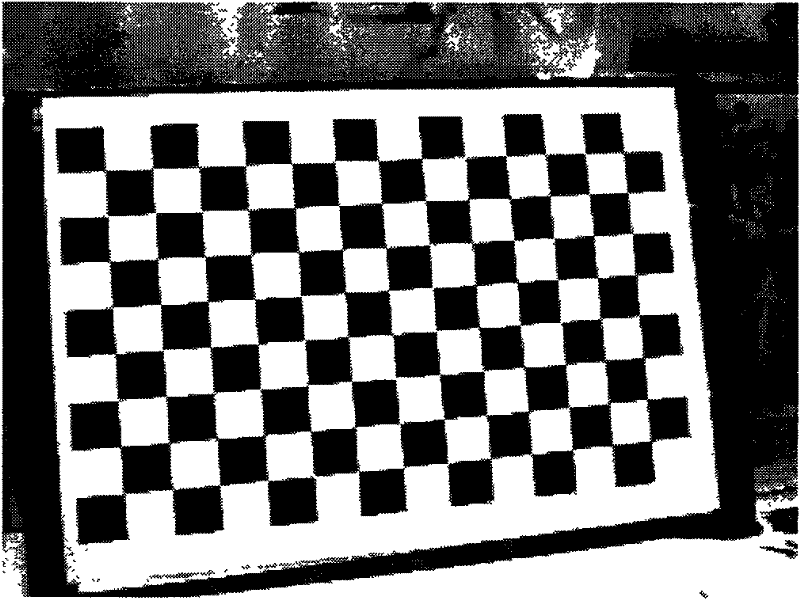
[0026] In order to realize the method of the present invention, adopt a computer of CPU2.33G, internal memory 2G during implementation, adopt VC to compile relevant program on computer, used camera is Logitech (logitech) C200, and inertial sensor is MTi miniature inertial sensor, calibration object is Black and white checkerboard. figure 1 Be the flowchart of the inventive method, figure 2 It is a hardware schematic diagram of the combined positioning and attitude determination system of the camera and the inertial sensor in the example of the present invention.
[0027] Concrete implementation steps of the present invention are as follows:
[0...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More