

Unpiloted independently-driven and steered vehicle dynamics control quantity obtaining method
An unmanned, independent drive technology, applied in the field of vehicle dynamics, can solve the problem of not considering the reachable domain constraints of vehicle dynamics control variables, not considering real-time observation and utilization of system disturbances, and unsatisfactory dynamic control effects, etc. problem, achieve ideal dynamic control effect, improve speed and accuracy, and increase stability margin
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0029] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
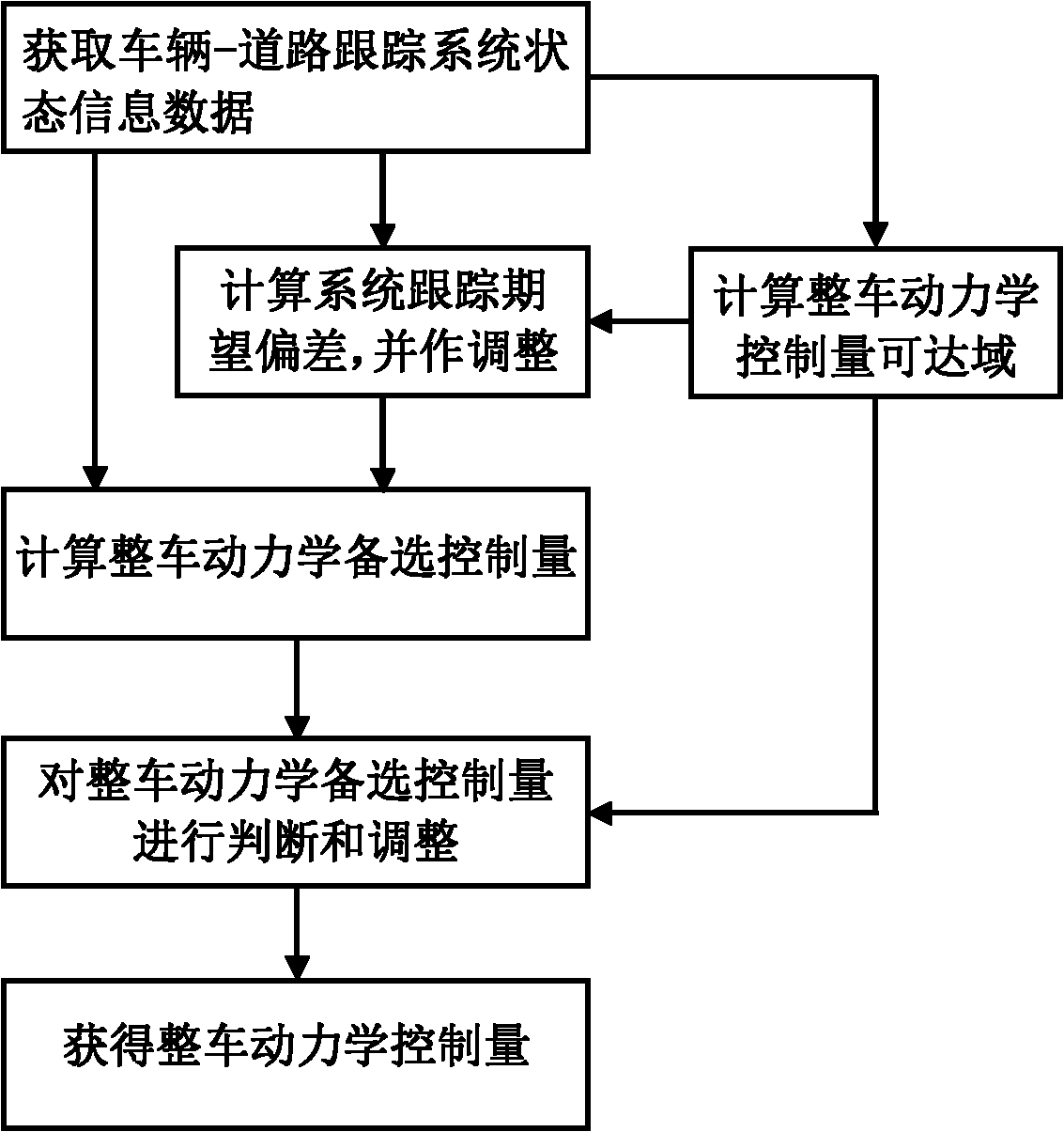
[0030] The unmanned AWID-AWIS vehicle vehicle dynamics control acquisition method of the present invention is as follows: figure 1 shown, including the following steps:
[0031] 1) Estimate the mass and moment of inertia of the vehicle, collect the actual vehicle speed, lateral distance deviation and yaw angle deviation data corresponding to the vehicle center of mass in the vehicle-road tracking system, and the basic information of vehicle kinematics and dynamics for vehicle-road tracking , combined with the information fusion method to obtain the system state information data {X} required for the vehicle dynamics control of the unmanned AWID-AWIS vehicle; the specific method is as follows:
[0032] 1.1) Estimate the mass and moment of inertia of the vehicle in the step 1), specifically using the unmanned AWID-AWIS vehicle nominal mass m n and the no...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More