

Networked rehabilitation robot system based on virtual training environment
A rehabilitation robot and virtual training technology, which is applied in the field of networked rehabilitation robot system, can solve the problems of not joining network communication and affecting the effect of rehabilitation training, so as to improve the efficiency of diagnosis and treatment, stimulate initiative and enthusiasm, and realize the effect of doctor-patient interaction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention will be further described below with reference to the accompanying drawings and specific embodiments.
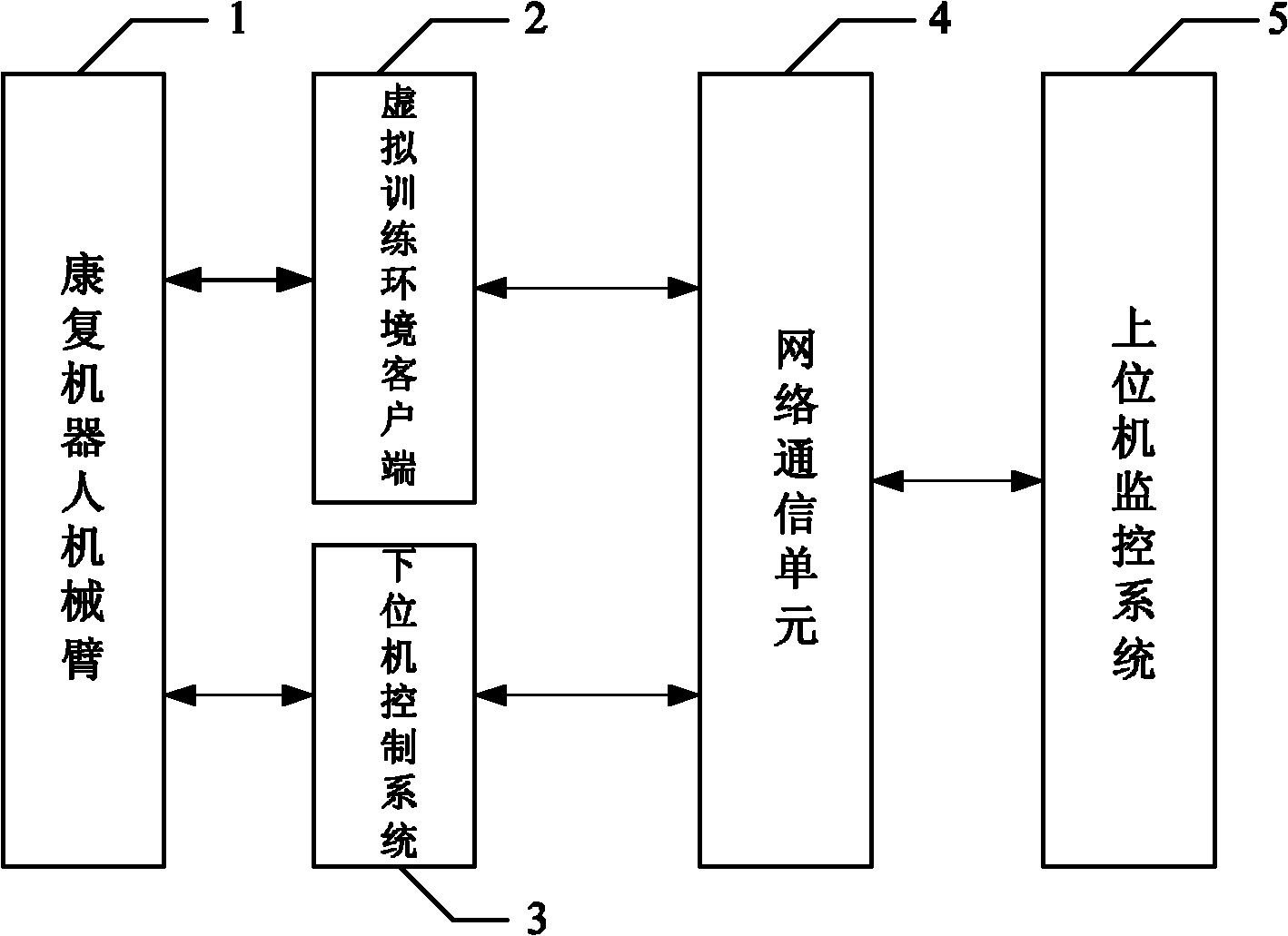
[0025] Such as figure 1 As shown, a networked rehabilitation robot system based on a virtual training environment designed by the present invention includes a rehabilitation robot mechanical part 1, a virtual training environment client 2, a lower computer control system 3, a network communication unit 4, and an upper computer monitoring system 5. The mechanical arm 1 of the rehabilitation robot is the executive mechanism that drives the patient's affected limbs to carry out rehabilitation training; the virtual training environment client 2 provides a virtual environment scene for interaction with the patient, and the lower computer control system 3 receives and processes the data collected by the sensor, and receives the data collected by the upper computer. The instructions of the computer monitoring system 5 control the operation of the entire...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More