

Robot behaviour multi-level integrated learning method and robot behaviour multi-level integrated learning system
An integrated learning and robotics technology, applied in control/regulating systems, instruments, speed/acceleration control, etc., can solve the problems of lack of integration, long-time incentive learning and training, and inability to meet adaptive learning, so as to improve control capabilities Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The preferred embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings; it should be understood that the preferred embodiments are only for illustrating the present invention, rather than limiting the protection scope of the present invention.
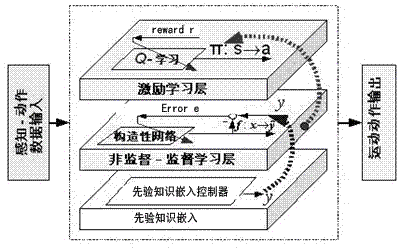
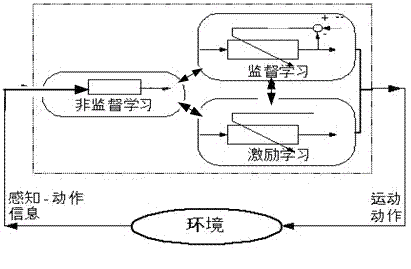
[0041] figure 1 A schematic diagram of the hierarchical learning system provided by the present invention; figure 2 It is a schematic diagram of the hierarchical learning structure of the three learning modes of the present invention, as shown in the figure: the robot behavior multi-level integrated learning method provided by the present invention includes the following steps:
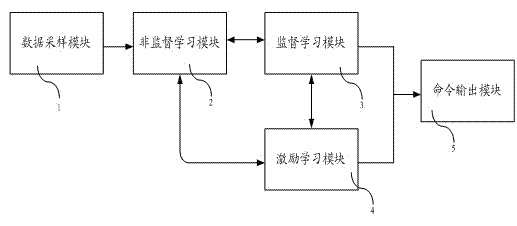
[0042] S1: Input the robot-environment interaction perception information data and the state information data of the current movement action;
[0043] S2: According to the changes in the interactive perception information between the robot and the environment, obtain the environmental pattern...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More