Rehabilitation training robot for paraplegic patient
A rehabilitation training and robotics technology, applied in passive exercise equipment, equipment to help people walk, physical therapy, etc. value, speeding up the recovery process, and shortening the course of treatment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
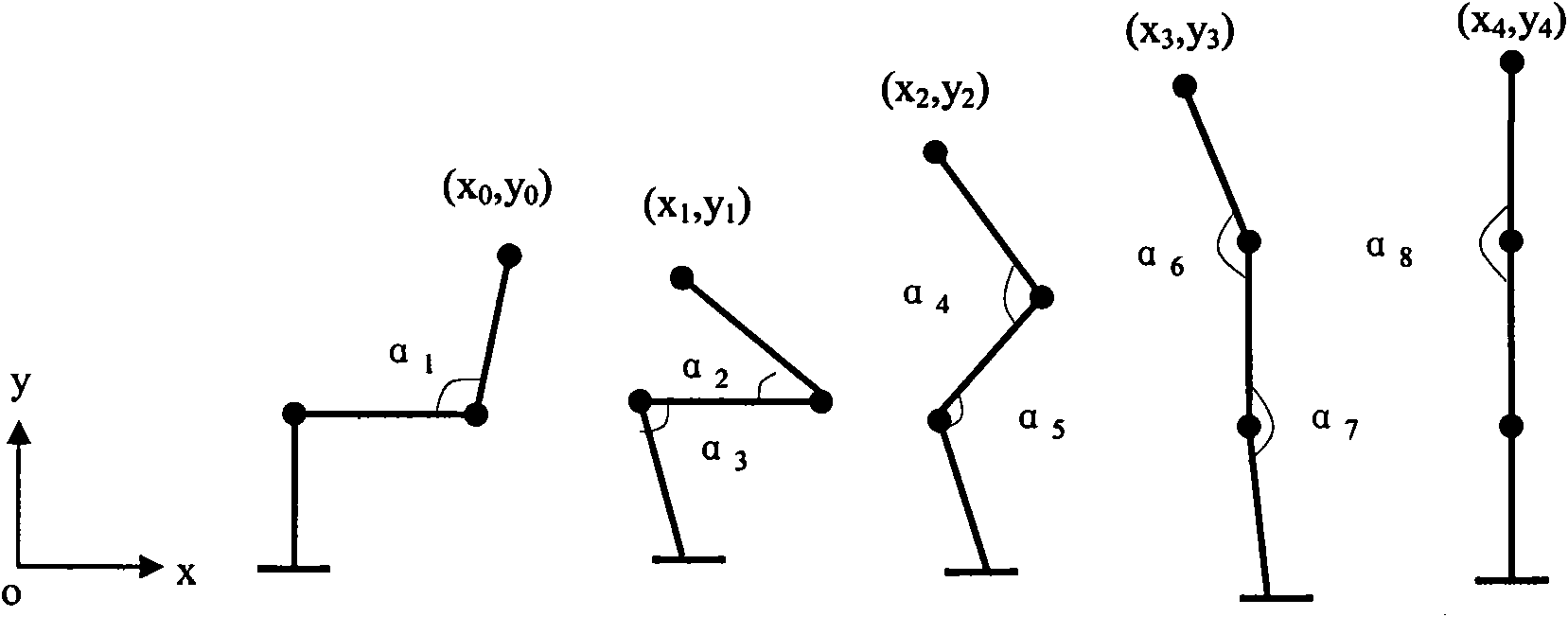
[0036] The rehabilitation training robot for paraplegic patients has four main components: mechanical linkage, servo drive system, motion control module and power supply. The mechanical linkage includes calf mechanism, thigh mechanism, and chest mechanism (as shown in the motion planning diagram, From bottom to top, the calf mechanism, thigh mechanism, and chest mechanism); the calf mechanism, thigh mechanism and chest mechanism are connected by joints and are worn on the patient during use. The servo drive system drives the calf mechanism under the control of the motion control module , Thigh mechanism and chest mechanism to complete the training exercise.
[0037] The motion control module includes a rehabilitation training unit and a walking aid unit.
[0038] The rehabilitation training unit includes a sitting-up sub-unit, a sitting-down sub-unit, a standing sub-unit, a stepping sub-unit, and a single-step walking sub-unit;
[0039] The walking assistance unit includes a walking...
Embodiment 2
[0041] The rehabilitation training unit is mainly suitable for the initial training of patients in high and low positions, including sitting up subunit, sitting down subunit, standing subunit, standing step subunit, and single step walking subunit;
[0042] Such as figure 1 with figure 2 As shown in the sitting-up sub-unit, sitting-down sub-unit, and standing sub-unit, patients can perform up, sitting and standing training to enhance the muscle strength of the lower limbs and the balance of the body, and also exercise the arm strength of the upper limbs. In addition, you can Enhance the patient's adaptability to the trainer and lay a solid foundation for further training.
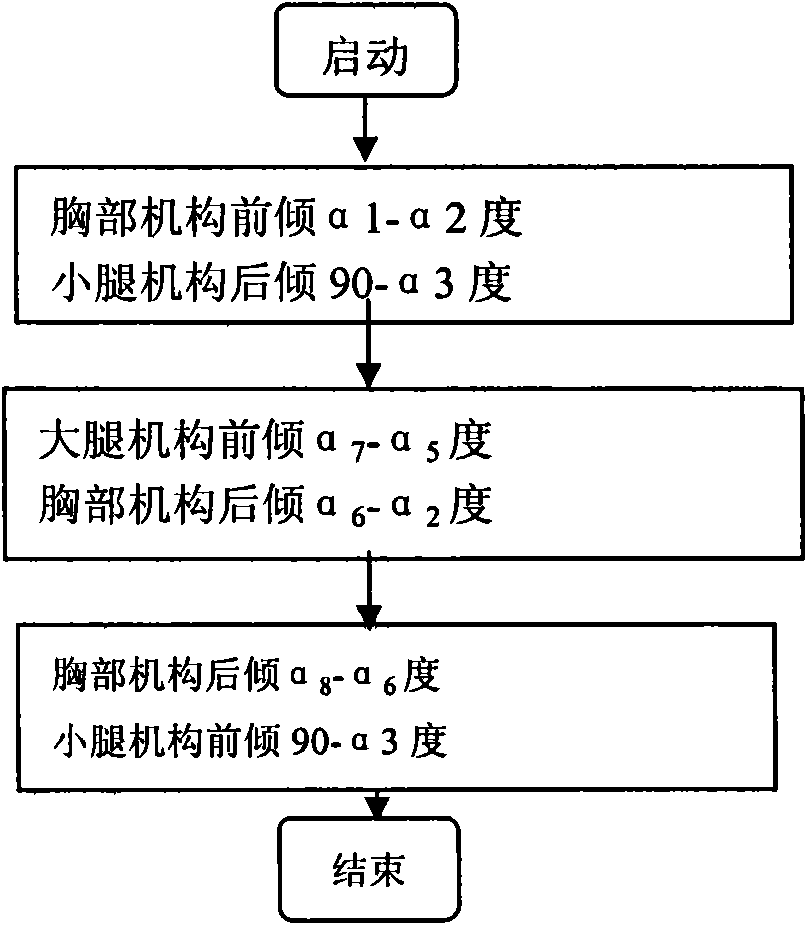
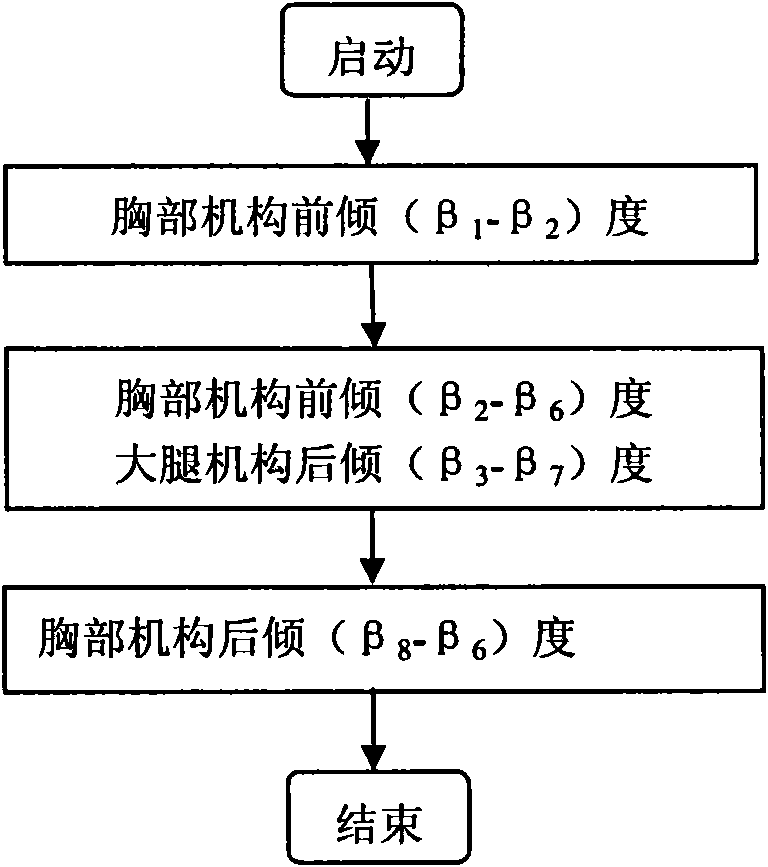
[0043] Specifically: (1) Sit-up sub-unit, including 5 control steps: bending step, center of gravity forward step, legs and waist gradually straightening step, waist straightening step, straight leg step, center of gravity shifting to the legs; figure 2 It is a movement process from sitting to standing. In this...
Embodiment 3
[0054] After the patient has undergone a period of rehabilitation training, his body and joints have been exercised and recovered to a certain extent, and he has mastered his own balance during the exercise. The patient can rely on crutches to walk and move like a normal person, and continue to do it through activities. Rehabilitation training also realizes self-care in life, enhances patients’ self-confidence in life, and promotes the process of rehabilitation training. Then you can enter the mobility planning unit, which includes the walking sub-unit and the moving up and down steps.
[0055] 1. Walking subunit
[0056] When the patient wears the lower limb rehabilitation training device and is more proficient in single-step walking, he can start continuous walking training. Continuous walking is divided into: shifting the center of gravity to the right (first supported by the right leg), raising the left leg, lowering the left leg, shifting the center of gravity between the two...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com