

Backstepping-based hydraulic type active suspension control method
A technology of active suspension and control method, which is applied in the direction of suspension, elastic suspension, transportation and packaging, etc., and can solve problems that are difficult to apply to real vehicle control and parking
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
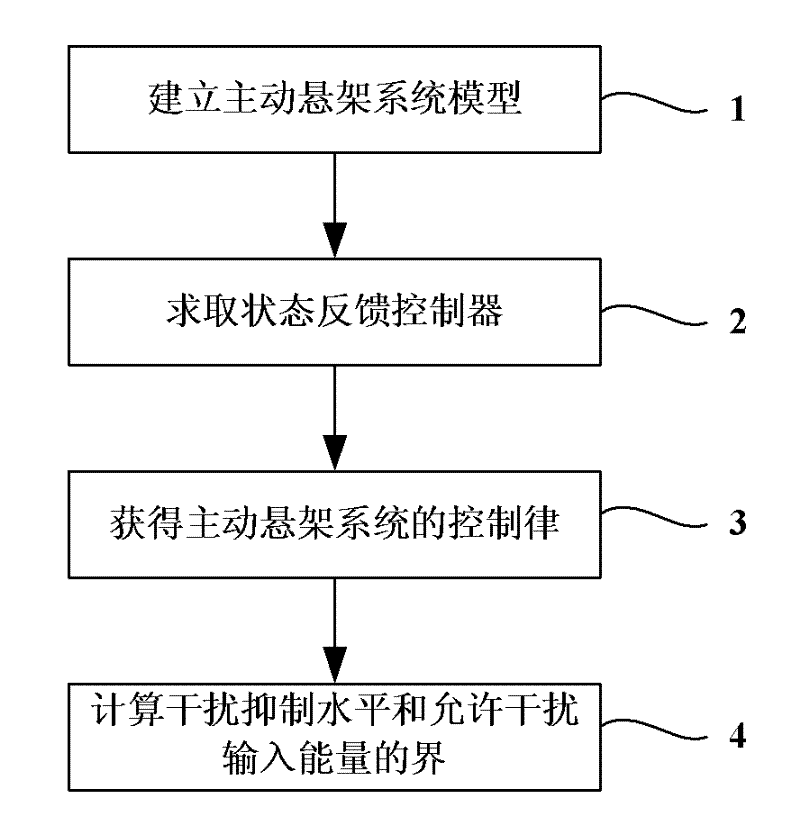
[0040] figure 1 It is a flow chart of the hydraulic active suspension control method based on Backstepping, according to figure 1 Shown, the realization process of the present invention comprises:
[0041] Step 1: Build an active suspension system model.
[0042]In the present invention, first consider the nonlinear term as a hypothetical control variable design constraint H ∞ The controller implements the required performance index requirements.
[0043] To establish the model of the active suspension system, a linear time-invariant (LTI) model is specifically selected, that is,
[0044]
[0045] where x ∈ R n and ξ∈R m are the state variables of the linear subsystem and the nonlinear subsystem respectively, the state variable ξ of the nonlinear subsystem is the input of the linear subsystem, and f and g satisfy g(x,ξ)=diag{g 1 (x, ξ 1 ), g 2 (x, ξ m ), L, g m (x, ξ m )}, and are external input and control input respectively, and Respectively control o...
Embodiment 2
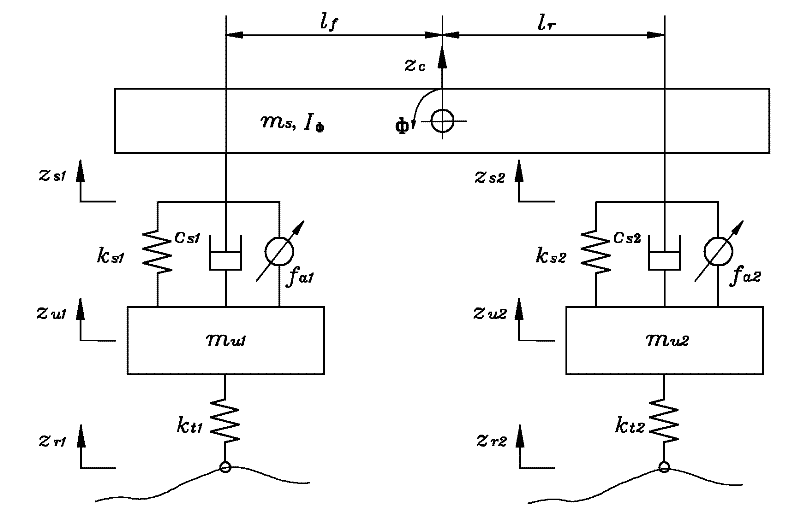
[0069] figure 2 is a schematic diagram of a four-degree-of-freedom half-car model, figure 2 In this paper, aiming at the nonlinear dynamic characteristics of the actuator, the flow control active suspension semi-vehicle system is taken as the design model. Select state variables as follows:
[0070]
[0071] ξ = Q 1 Q s , Q 2 Q s T
[0072]
[0073] Among them, the introduction of hydraulic system rated pressure P s and rated flow Q s The purpose of is to normalize the variables. The state space descrip...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More