

Vehicle steering control method and device, computer equipment and storage medium
A steering control and vehicle technology, applied in the fields of computer equipment and storage media, vehicle steering control methods, and devices, can solve problems such as poor real-time performance, loss of system control accuracy, and impact on vehicle stability, so as to improve handling stability and improve computing power. Efficiency, the effect of improving adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0063] In order to make the purpose, technical solution and advantages of the present application clearer, the present application will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present application, and are not intended to limit the present application.
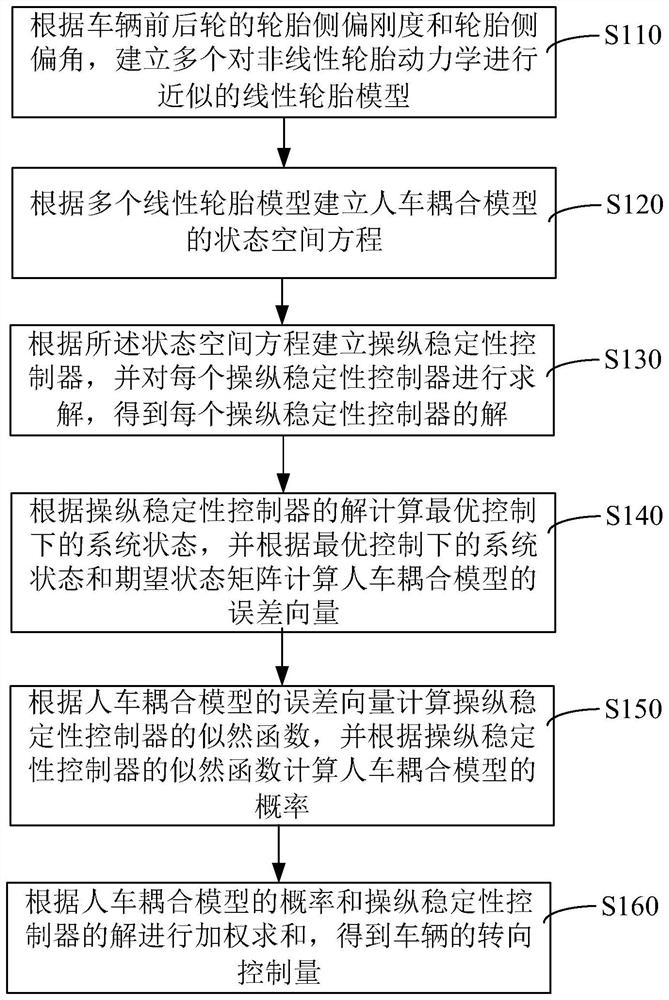
[0064] In one embodiment, such as figure 1 As shown, a vehicle steering control method is provided, comprising the following steps:
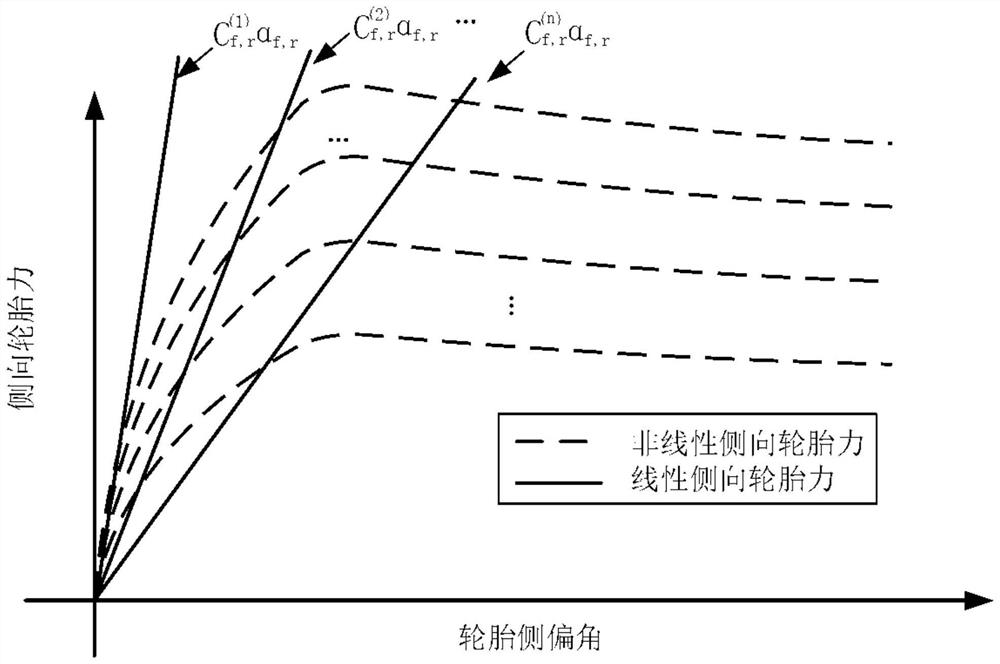
[0065] S110, according to the tire cornering stiffness and tire slip angle of the front and rear wheels of the vehicle, establish a plurality of linear tire models for approximating nonlinear tire dynamics.
[0066] Wherein, the vehicle includes front wheels and rear wheels, and tire cornering stiffness and tire side slip angle are calculated respectively according to the front wheels and rear wheels. Such as image 3 As shown, the dotted...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More