

Four-leg robot mechanism based on bionic design
A robot and leg technology, applied in the field of robots, can solve the problems of limited movement flexibility, many connecting rods, redundant degrees of freedom, etc., and achieve the effect of simple and compact overall structure, easy reliability, and convenient installation and disassembly.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] Further illustrate the present invention below in conjunction with accompanying drawing.
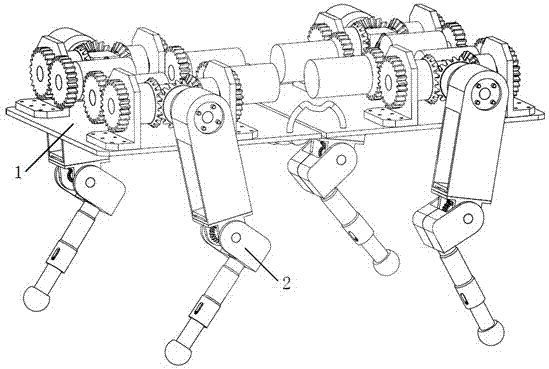
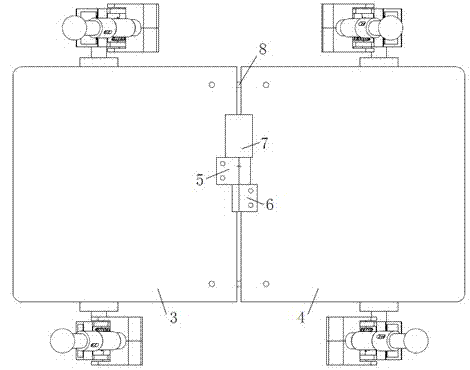
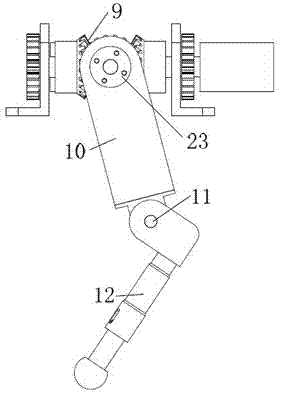
[0016] Such as figure 1 , 2, 3, 4, and 5, the four-legged robot mechanism based on bionic design includes a body frame 1 and four legs 2; the four legs 2 are fixed on the body frame 1; the four legs 2 include a hip 9, a large Leg 10, knee 11 and calf 12; hip 9 connects thigh 10, thigh 10 connects knee 11, knee 11 connects calf 12; body frame 1 includes body front panel 3, body Back plate 4, front rotating flange 5, rear rotating flange 6, first motor 7 and flexible handle 8; Front rotating flange 5 is fixed on the body front plate 3, and rear rotating flange 6 is fixed on the body rear plate 4 , the front rotating flange 5 and the rear rotating flange 6 constitute a rotating pair, the first motor 7 is fixed on the front rotating flange 5, the output shaft of the first motor 7 is connected to the rear rotating flange 6, and the two ends of the flexible handle 8 are respectively B...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More