

Labriform mode under-actuated flexible pectoral fin bionic device
A technology of underactuation and jaw movement, which is applied in the field of underwater bionic robots, can solve the problems of complex drive and transmission system structure, many drive variables, and difficult control, and achieve a compact pectoral fin bionic device, elimination of coupling effects, and low energy consumption. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
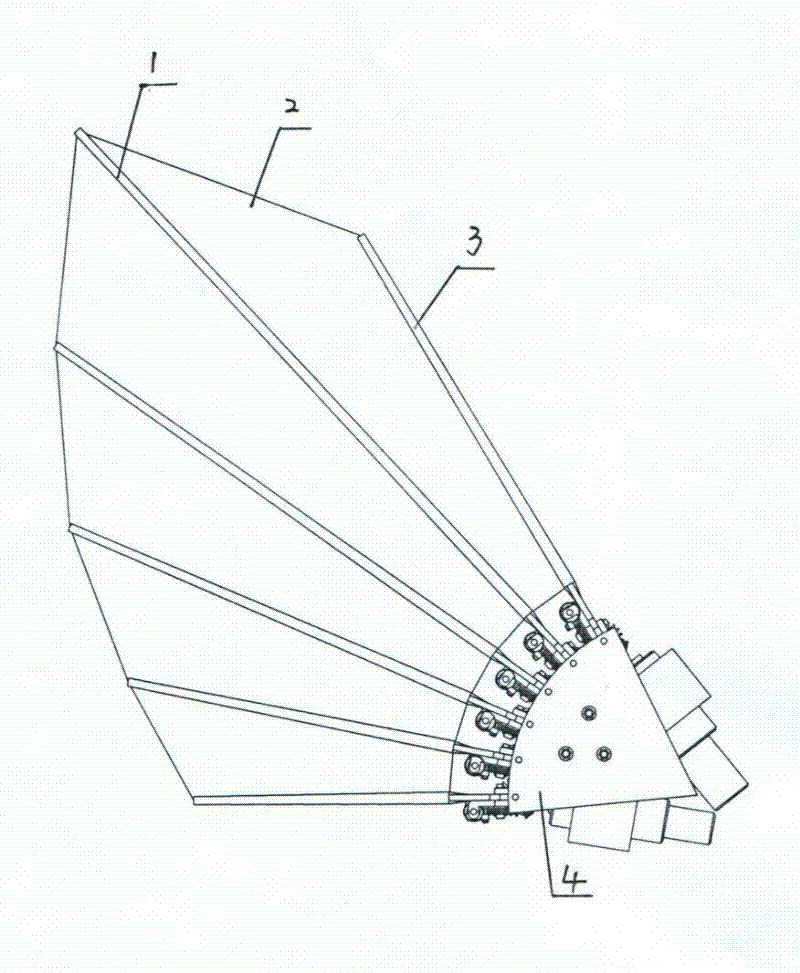
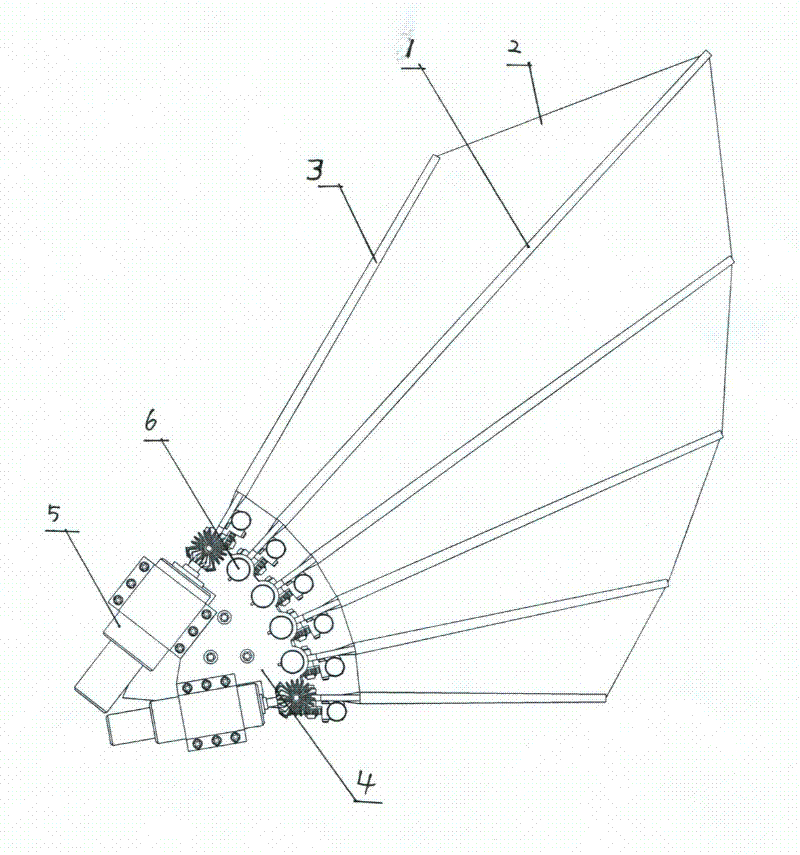
[0019] A bionic device for underactuated flexible pectoral fins in pharyngeal and jaw movement mode. The pectoral fins are equivalent to the forelimbs of terrestrial animals and are born on the chest at the rear edge of the gill cover. For fish, it has the functions of movement, balance and grasping the direction of movement. When the fish stops moving forward, the pectoral fins are used to control the balance of the fish body; when swimming slowly, the pectoral fins act as paddles; Braking; when one side of the pectoral fin is close to the fish body and one side is lifted, the fish body turns and advances towards the lifted side, assisting the caudal fin to act as a rudder.
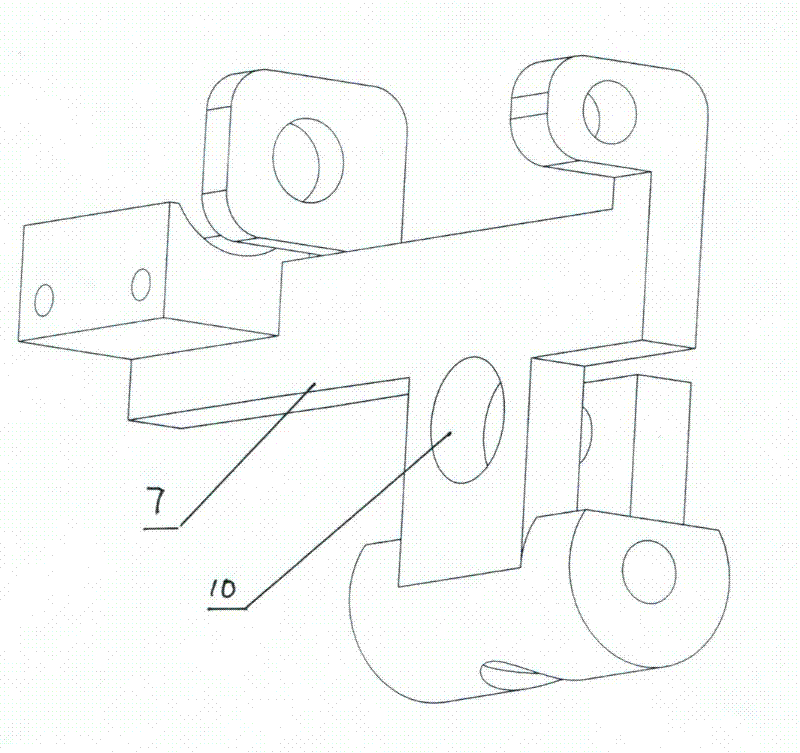
[0020] The pectoral fin bionic device of the present invention is provided with a fin base 4, a fin ray and a fin interval film 2 arranged between adjacent fin rays, and the fin ray includes two side fin rays 3 and a fin ray arranged between the two side fin rays At least one middle fin ray 1, the fin r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More