

A Vision-Based Lunar Rover Localization Method in Sandy Environment
A positioning method and lunar rover technology, applied in the field of vision-based lunar rover positioning, can solve problems such as difficulty in ensuring feature points and inability to reduce search space, and achieve the effects of ensuring quantity and quality, improving robustness, and improving efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
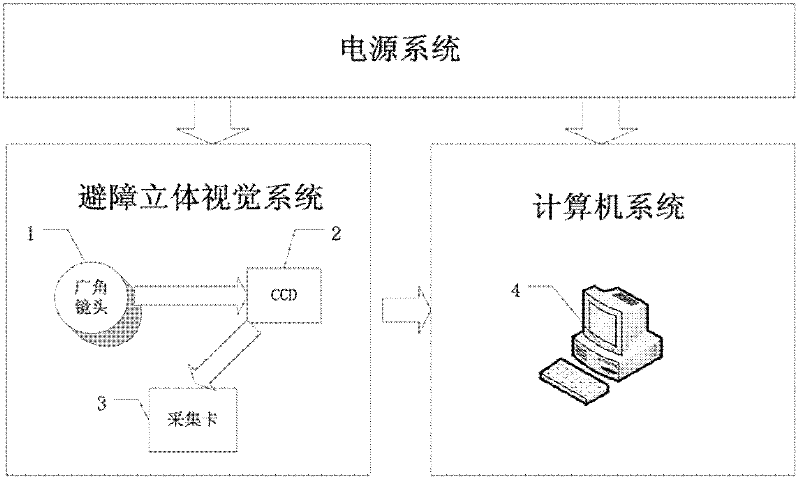
[0042] The present invention will be further described below in conjunction with the accompanying drawings. Such as figure 1 As shown, a vision-based lunar rover positioning system includes an obstacle avoidance stereo vision system, a computer system 4 and its power supply system. The obstacle avoidance stereoscopic vision system includes a pair of CCD image sensors 2, a pair of wide-angle lenses 1, and an image acquisition card 3, wherein the function of the CCD image sensor 2 is to convert the collected left and right image pixels into digital signals, and the function of the wide-angle lens 1 is to take large-scale images at close range. Scope scenery, the image acquisition card 3 collects image signals in the computer, and saves them on the hard disk in the form of data files. The computer system 4 is used to process the image data collected by the acquisition card, and the power supply system provides power for the obstacle avoidance stereo vision system and the comput...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More