

A double wheel arm locking type inspection robot mechanism
An inspection robot and arm lock technology, applied in the field of inspection robots, can solve the problems that it is difficult to achieve the accuracy required for inspection, the inspection quality is easily affected by weather, and the labor intensity is high, and the ability to climb obstacles is strong and easy to climb. The effect of strong control and walking ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be described in further detail below with reference to the drawings.
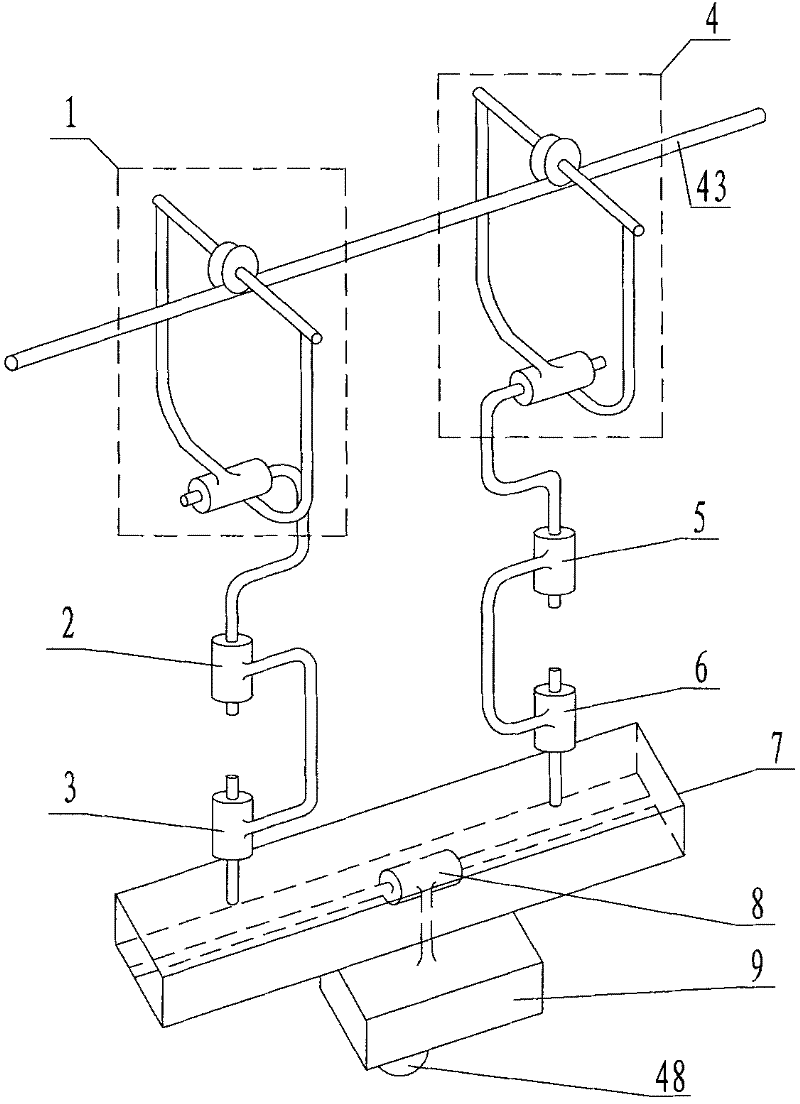
[0027] Such as figure 1 As shown, the present invention includes two front and rear wheel arms with the same structure installed on the guide rail seat 7, as well as the guide rail seat 7, the center of mass adjustment mechanism 8, and the electrical box 9. The lifting mechanism 2 and the front turning mechanism 3 are composed, and the rear wheel arm is composed of the rear walking obstacle crossing mechanism 4, the rear lifting mechanism 5, and the rear turning mechanism 6. One end of the lifting mechanism is connected with a walking obstacle crossing mechanism that runs on the power transmission line 43, and the other end is connected with a slewing mechanism installed on the guide rail base 7, and a center of mass adjustment mechanism 8 is also installed on the guide rail base 7.
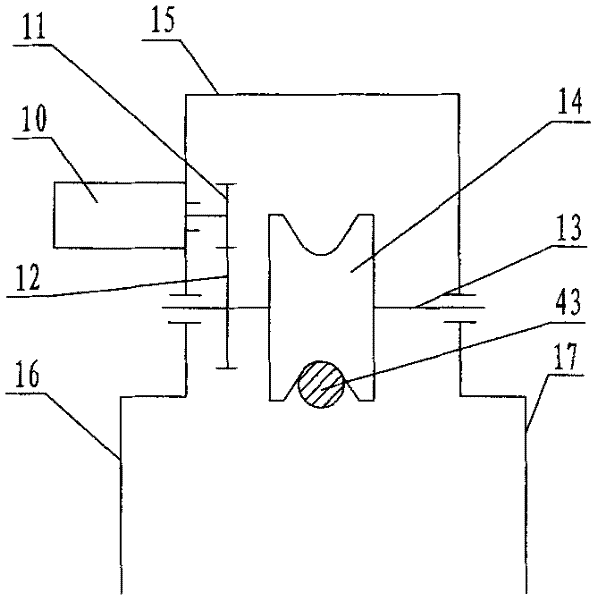
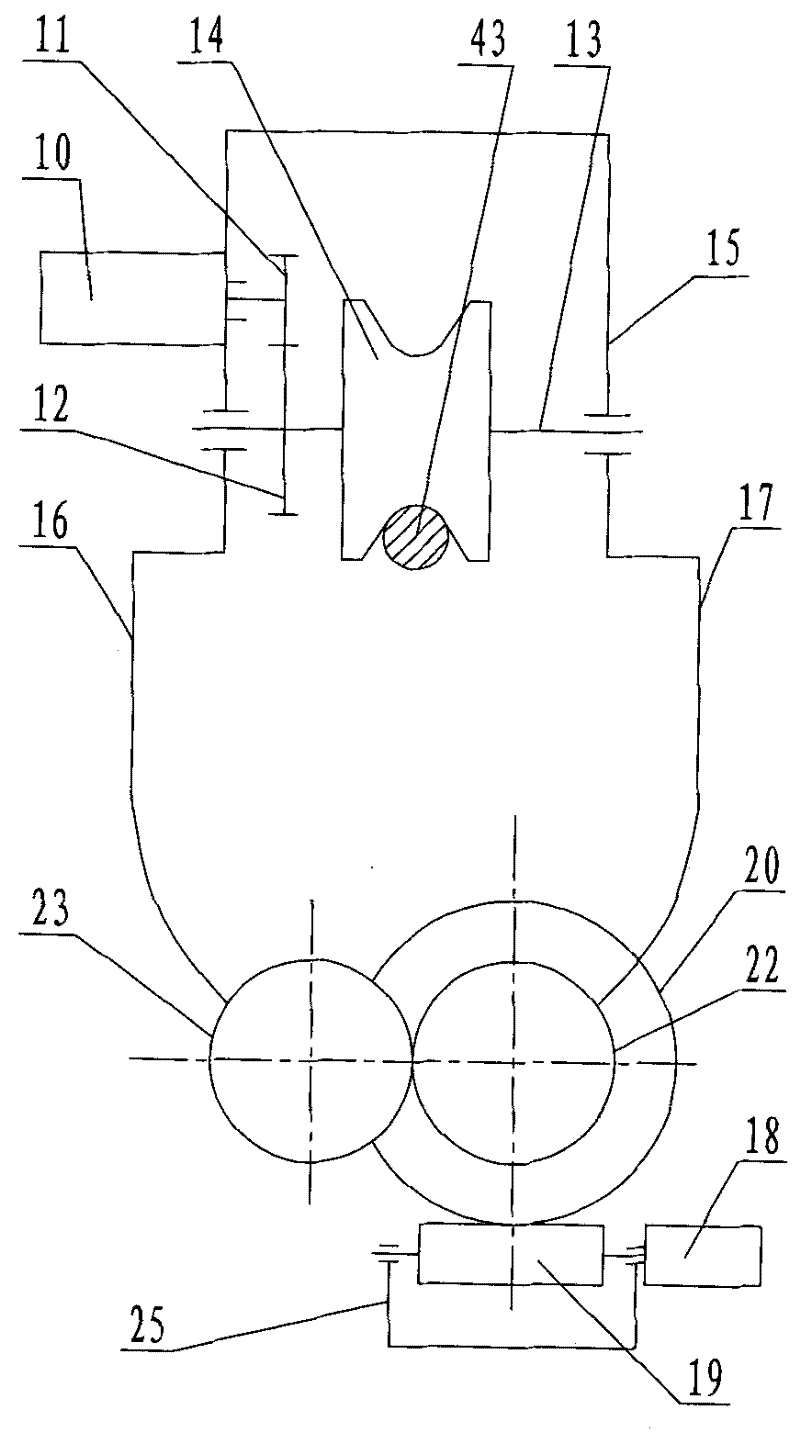
[0028] The front and back walking obstacle crossing mechanisms 1 and 4 of the present invention...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More