

A wrist of a two-degree-of-freedom industrial robot
A technology of industrial robots and degrees of freedom, applied in the direction of manipulators, manufacturing tools, joints, etc., can solve the problems of unguaranteed accuracy, low flexibility, difficult to control accuracy, etc., achieve simple structure, improve power transmission accuracy, and rotate wide range of effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
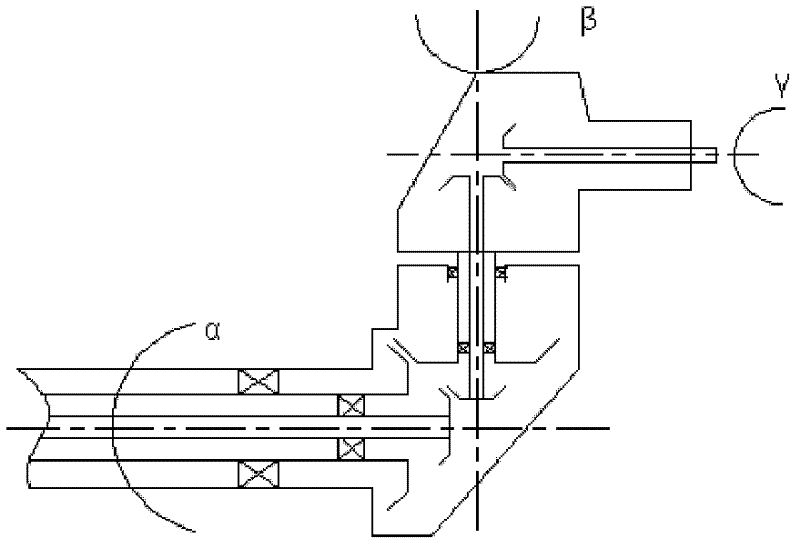
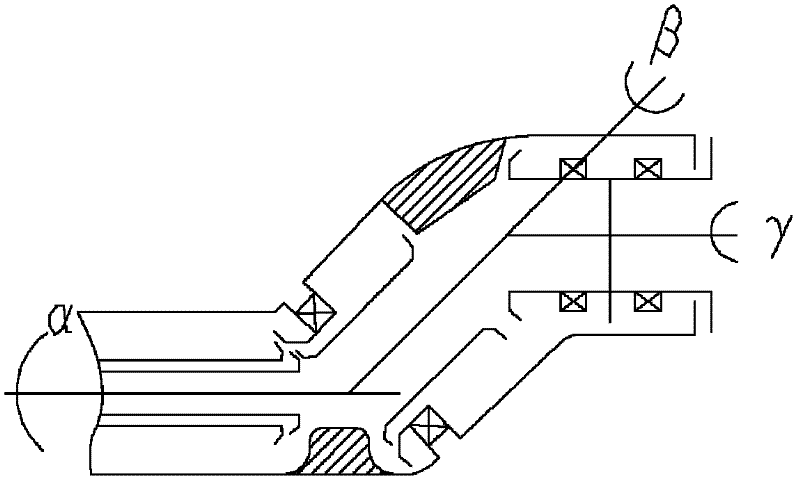
[0034] The wrist of a two-degree-of-freedom industrial robot in this embodiment has a structure such as Figure 7 or Figure 8 As shown, it includes a rotation drive mechanism and a pitch drive mechanism. The rotation drive mechanism includes a power input shaft 1, a bevel gear set 2 and a rotation gear shaft 3. One end of the power input shaft 1 and one end of the rotation gear shaft 3 are connected by the bevel gear set 2 , The other end of the power input shaft 1 is externally connected with a self-rotating power source, the other end of the rotation gear shaft 3 is connected with the wrist end effector, the power input shaft 1 and the rotation gear shaft 3 are arranged perpendicularly, and the power input shaft 1 is arranged in the axial direction of the wrist base 4 The pitch drive mechanism includes a pitch gear shaft 5, one end of the pitch gear shaft 5 is externally connected with a pitch power source, the other end of the pitch gear shaft 5 is connected to the wrist bas...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More