

Robot continuous sound source positioning method
A sound source localization and robot technology, which is applied in the field of robots, can solve the problems of low computing power of robots and the inability to truly reflect the relative position of the robot and the sound source, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0074] The method of the present invention will be described in detail below according to specific embodiments and accompanying drawings.
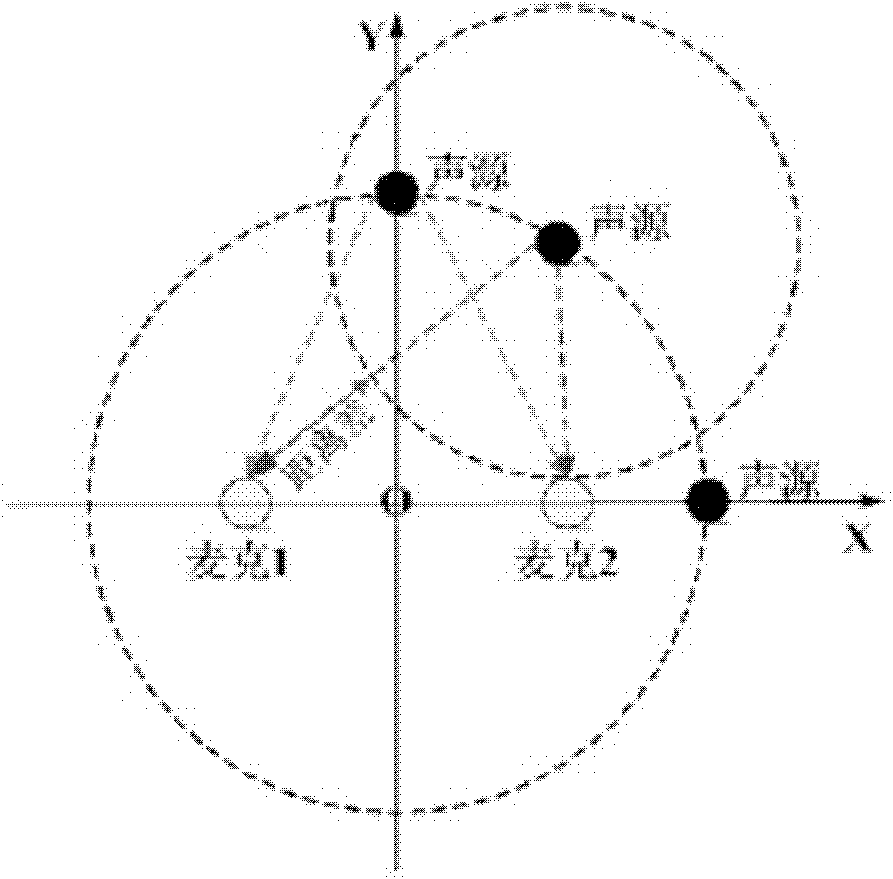
[0075] 1. Two pairs of microphone arrays respectively collect the sound source signal and perform analog-to-digital conversion into digital signal, and store it.
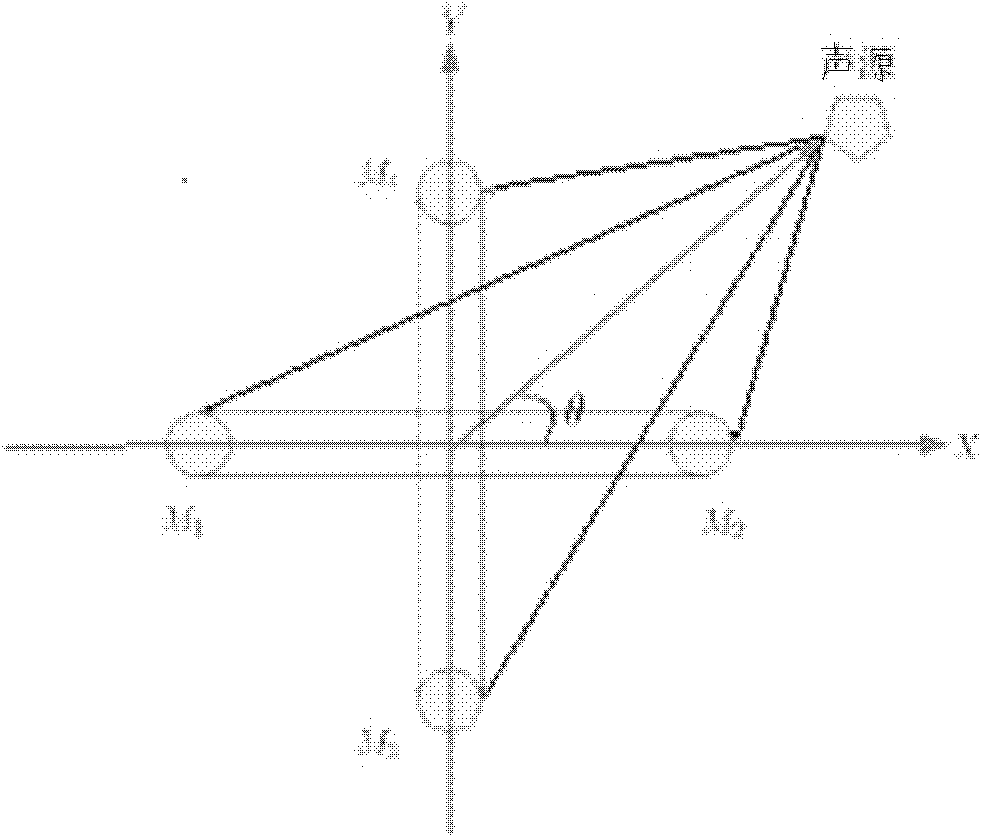
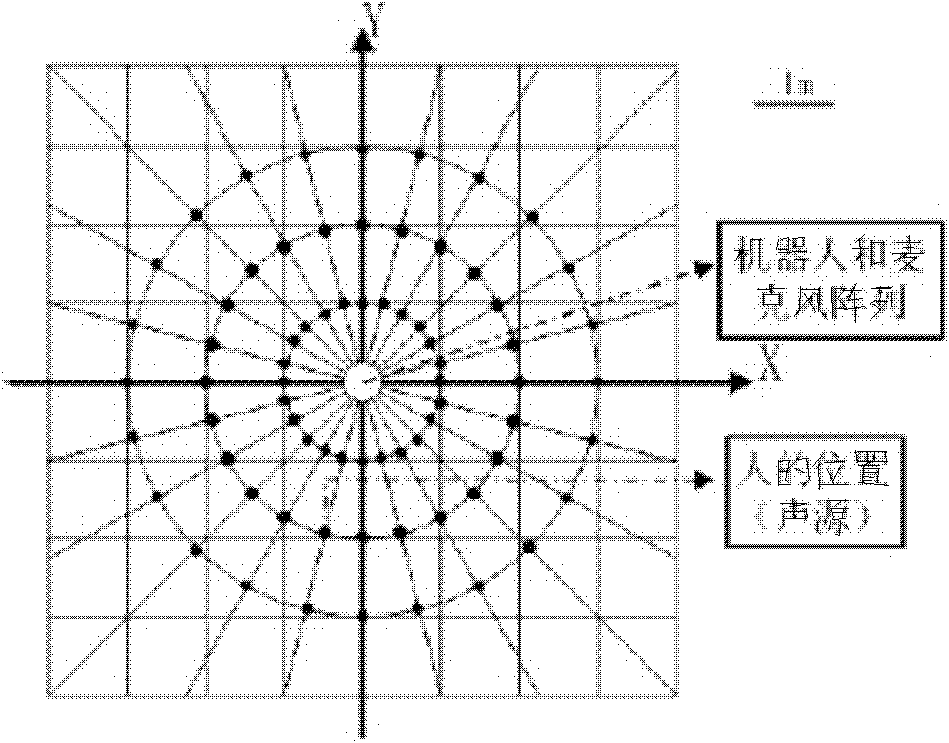
[0076] 2. Perform effective audio signal detection on the digital signal collected in 1, perform sound source localization calculation on the signal containing effective audio, and obtain the position of the sound source relative to the robot. Effective audio signal detection is an existing technology, which can be detected according to the characteristics of the sound source signal. In this embodiment, the effective audio signal detection is voice endpoint detection. If there is voice, the sound source localization operation will start. If there is no voice Then no positioning operation is performed. The collected voice signal is divided into frames in the time domain, that is...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More